|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
Úvod do námořní navigace našich předků až po současné technologie
Ondřej Rais
Úvod
Leží Česká Republika na západní polokouli, nebo na východní? Tato nevinná otázka může v našich mozkových hemisférách spustit velké množství různě se prolínajících logických smyček, ze kterých se potom jako mávnutím kouzelného proutku vynoří další a další otázky. Proč to tak je? K čemu nám to je? Potřebujeme to vůbec vědět? Tyto a další otázky vyvstanou v myslích každého z nás alespoň jednou za život. V současnosti se již díky moderním technologiím tímto zabývat nemusíme, jelikož nám veškerou navigaci, pozici, místo a čas zobrazí náš „chytrý“ mobil nebo speciální navigační plotter v uživatelsky přívětivé podobně, a to přímo na mapových podkladech se všemi možnými údaji o pozici nejen vlastní plachetnice, ale i většiny ostatních lodí. Představte si ale, že plujete někde na výletní jachtě, jste uprostřed oceánu (stačí zhruba 15 km od pobřeží, kde už se pevnina díky zakřivení zemského povrchu začíná „schovávat“ za horizontem) a z ničeho nic vám přestanou fungovat vaše lodní elektronické systémy. Nebo pokud prostě plujete ve známých vodách a elektronické systémy nemáte k dispozici. Před těmito výzvami stáli nejen naši předkové, ale i námořní dobrodruzi, či válečníci. Byl to jejich denní chléb, aby si uvědomili a stanovili, jakým směrem plují a kde se zhruba nacházejí. Byly to nedocenitelné zkušenosti, které mnohdy rozhodovaly o tom, jestli loď dopluje do cílového přístavu, nebo „uvízne“ někde uprostřed oceánu. Ačkoliv si to dnes již nedokážeme představit, lze to částečně prožít při plavbách na námořních plachetnicích. V dnešní době to ale vyžaduje značné množství sebekázně a dobrodružnou povahu. Je nutné se na chvíli vzdát chytrých telefonů a tabletů a elektronických navigačních přístrojů a místo toho využít starodávných pomůcek. Od sextantů, přes dalekohledy až po kružítka, náměrové kompasy a papírové námořní mapy. V konečném důsledku je to potom i zábava a romantika pro celou posádku. Každý zúčastněný si odváží nové poznatky a třeba se i něco naučí a v něčem to posune dál jeho vědomosti. Duše každého ze členů posádky jsou obohaceny o kouzlo přítomného okamžiku a ten je, věřte mi, velmi mocný a léčivý. Nejprve však uveďme některá fakta tak, jak byla chronologicky zapsána do našich lidských dějin. Letopočty jsou uváděny z pohledu využití v Evropě, samotné objevy jednotlivých přístrojů byly s největší pravděpodobností uskutečněny mnohem dříve.
Námořní navigace zahrnuje dva různé pohledy. Jednak musíme bezpečně vědět, kde se v daný okamžik nacházíme, a za druhé musíme vědět a umět plánovat cestu, kam bezpečně poplujeme. Na to, kde se právě nacházíme, potřebujeme mít pokročilejší znalosti v určování polohy a také rozlišujeme, jestli se nacházíme v blízkosti viditelného známého pobřeží nebo jsme na širém moři. Znalosti, bez kterých se neobejdeme, jsou například obzorníkové (azimutální) souřadnice, rovníkové (ekvatoreální) souřadnice, jejich definice, musíme se vyznat v námořním almanachu, orientovat se v mapách a v neposlední řadě také rozumět předpovědi počasí pohledem, nikoliv z rádia. Na druhou část, tj. kam vlastně plujeme, musíme disponovat dobrými strategickými a plánovacími schopnostmi, umět vyhodnotit situaci a hlavně nepřeceňovat posádku. Ovládání lodi beru jako samozřejmost.
Gnómón (6. st. př. n. l.)
Gnómón je astronomický přístroj v podobě jednoduché tyče zabodnuté do země, pomocí které můžeme snadno určit sluneční čas z úhlu stínu, který svírá s poledníkem. Délka stínu je potom nepřímo úměrná tangentě úhlu výšky Slunce nad obzorem a díky tomu lze určit období roku, nebo zeměpisnou šířku. Slovo pochází ze starořečtiny a znamená ukazatel, nebo v přeneseném významu také ten, jenž dokáže rozpoznat nebo odhalit. Historie gnómónu sahá až do starověké Číny zhruba do 14. st. př. n. l. Popularitu tomuto přístroji v Evropě pak zajistil zejména Anaximandros v 6. st. př. n. l.
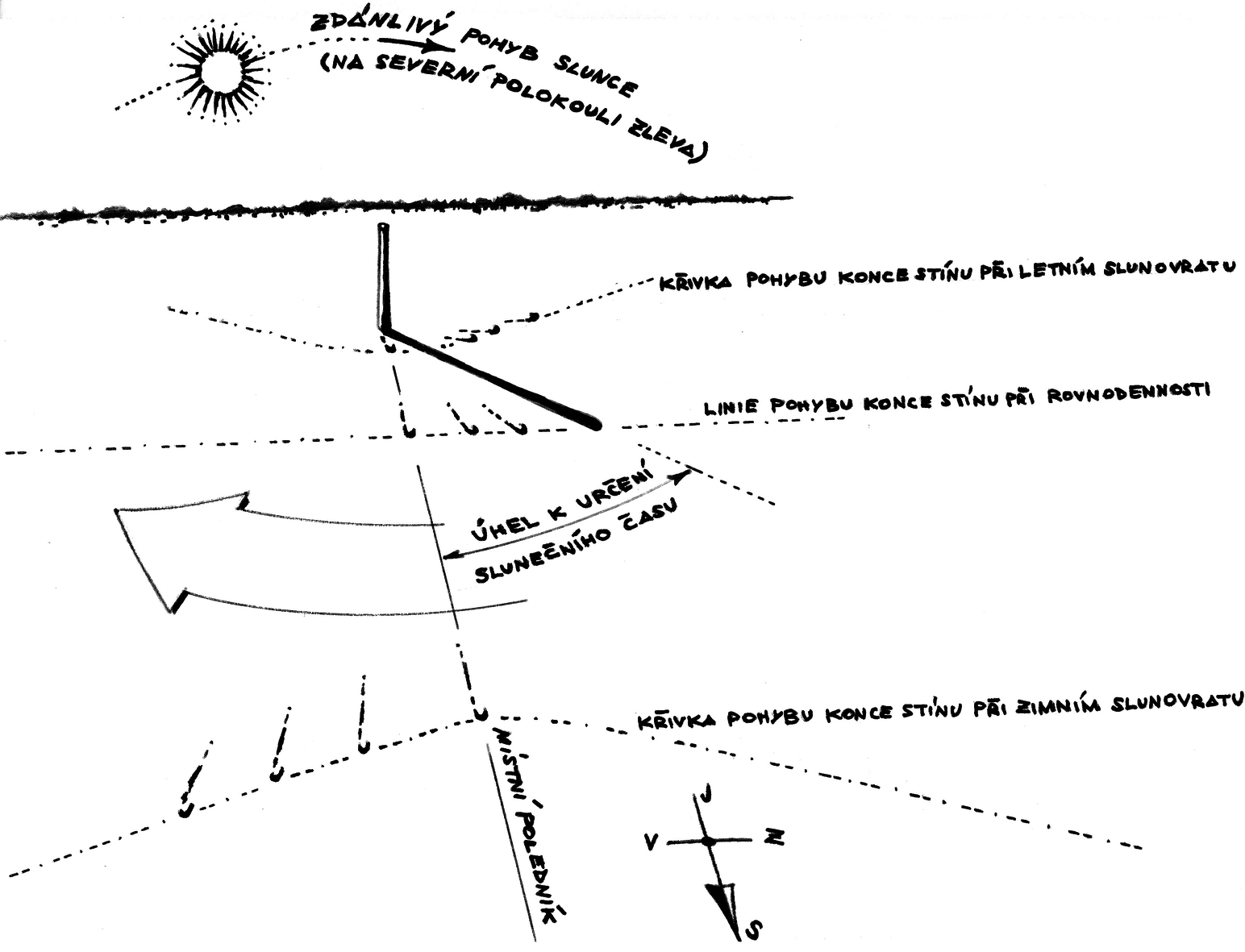
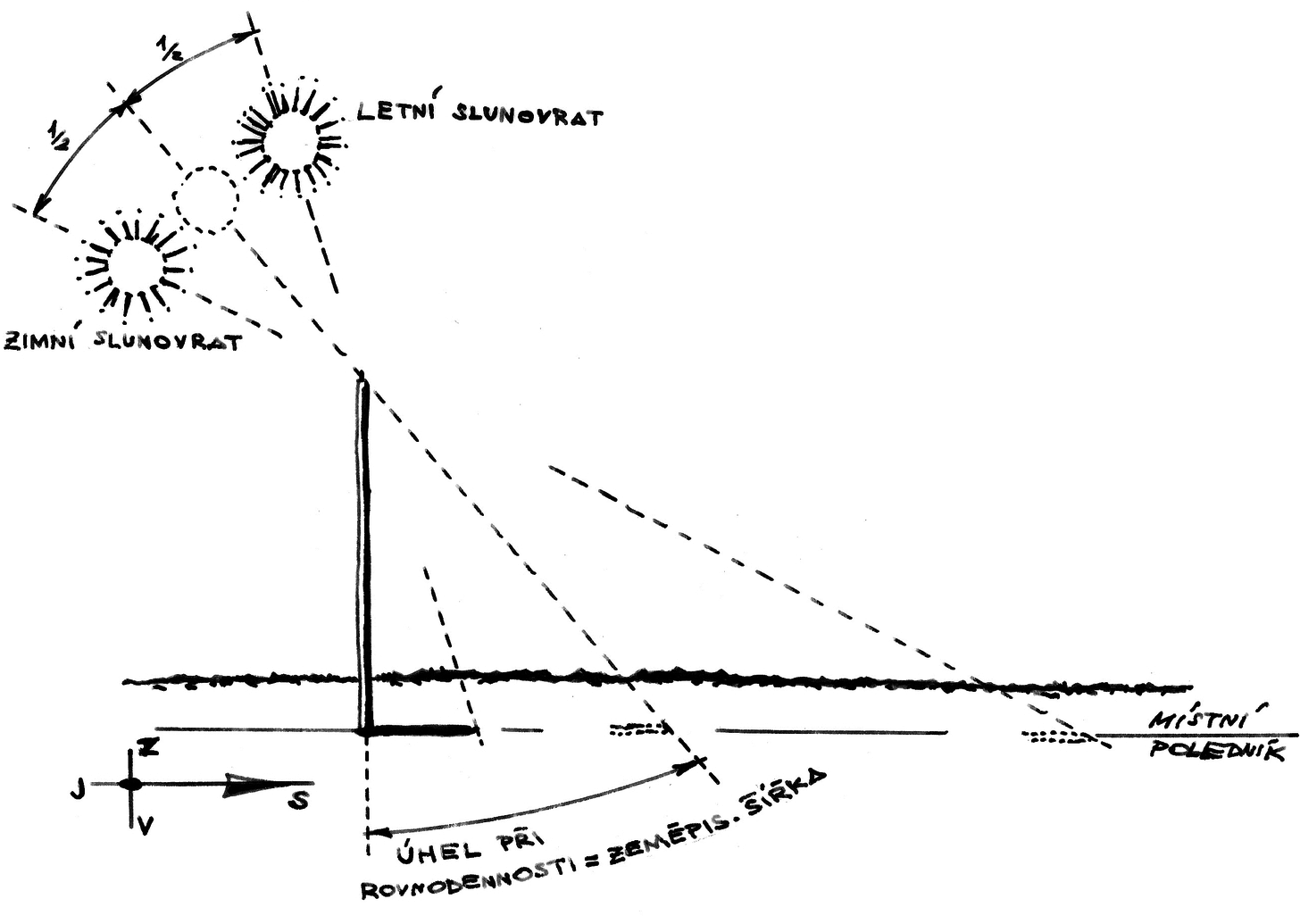
Průběh stínu gnómónu během dne
Astroláb (asi 2. st. př. n. l.)
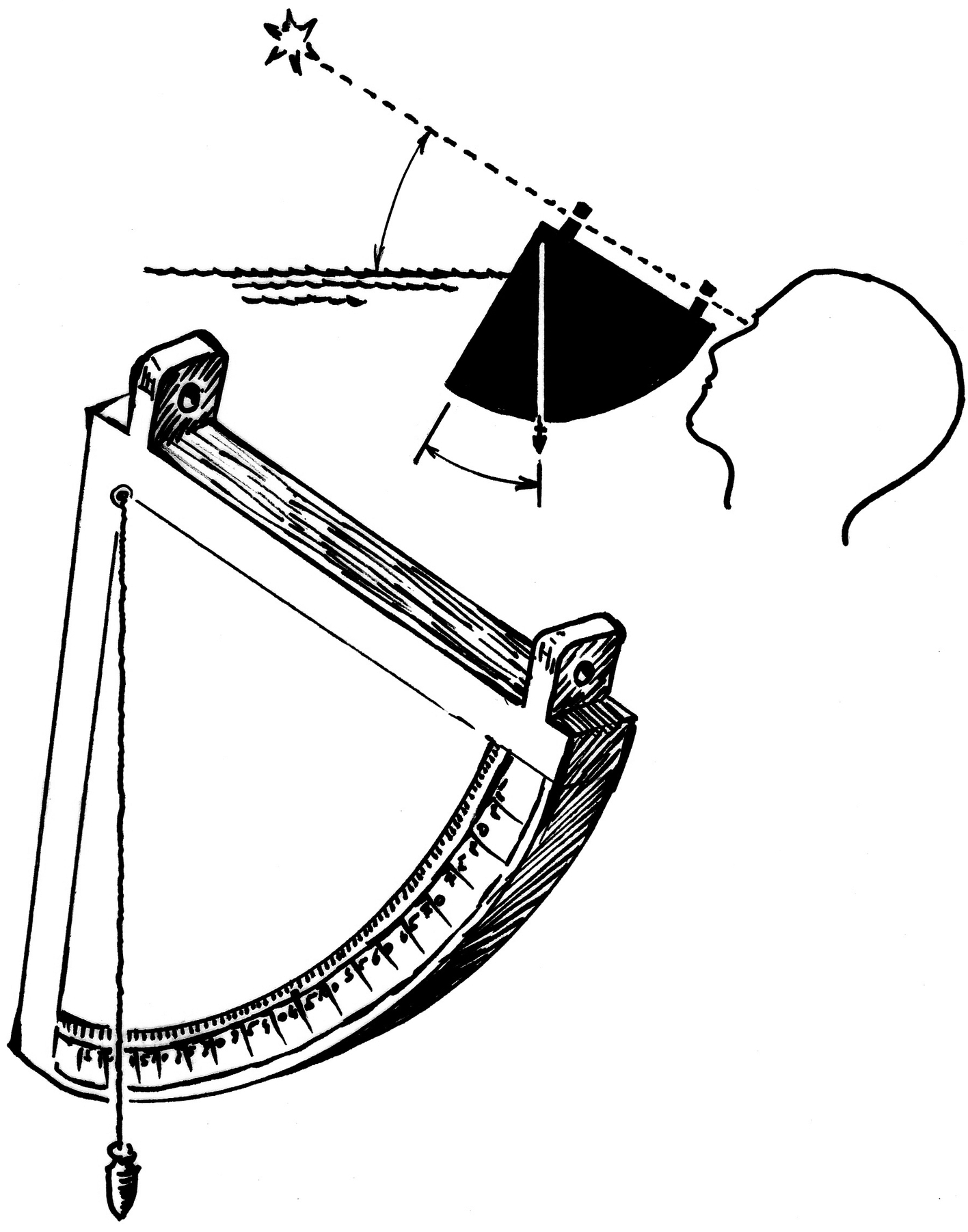
Astroláb známe ve třech různých variantách. Astronomický, geodetický a tomuto článku nejblíže je astroláb námořní. Stejně jako ve všech případech se i tento přístroj používal pro měření úhlové výšky Slunce a dalších hvězd nad obzorem. Astroláb byl v pozdějších letech nahrazen „přesnějším“ sextantem. Astroláb byl vynalezen a zkonstruován v antické době Apolloniem z Pergy někdy ve 2. st. n. l.
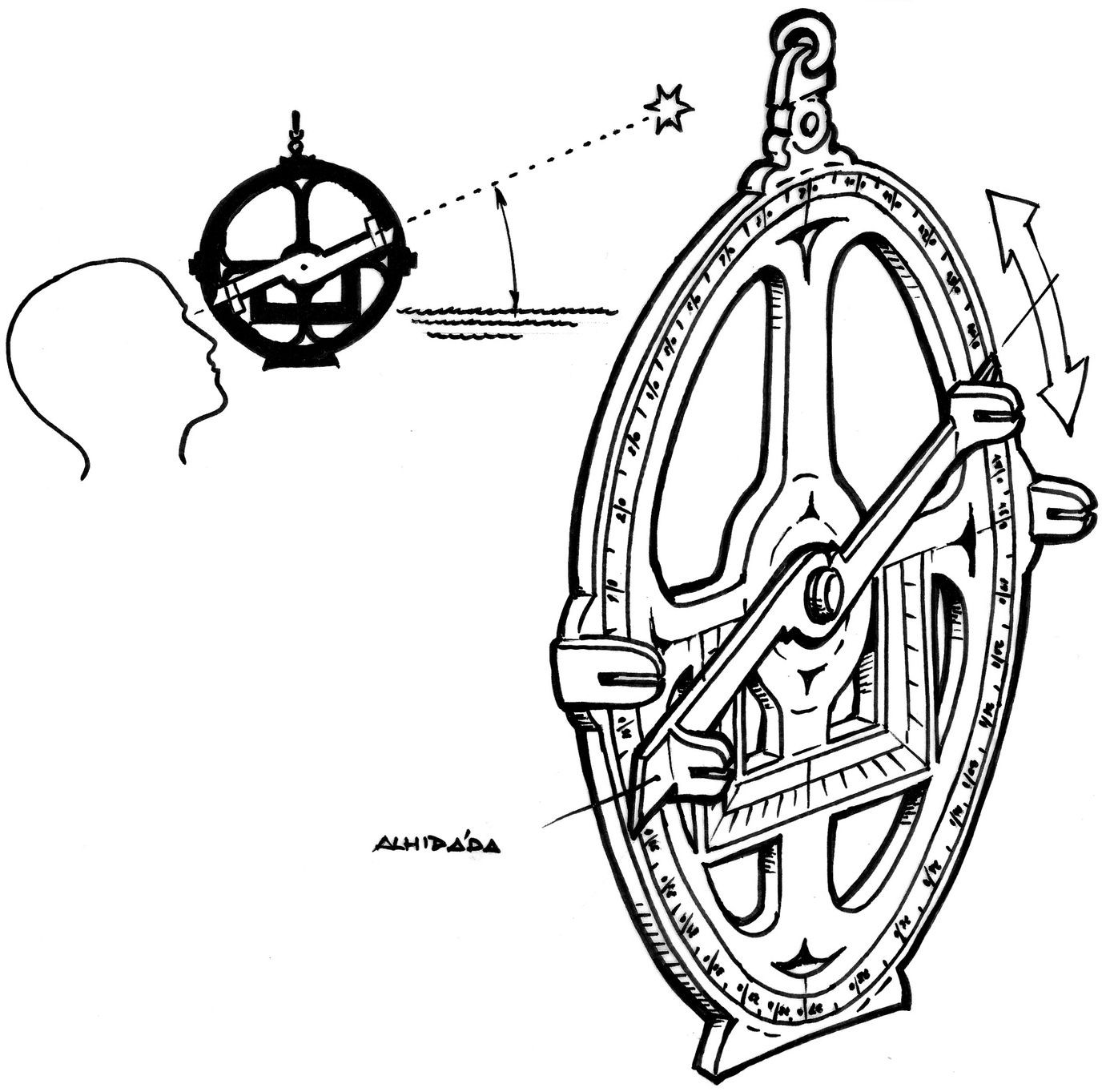
Astroláb a měření úhlové výšky hvězdy nad horizontem
Triquetrum (2. st. n. l.)
Triquetrum neboli paralaktické pravítko je následovníkem gnómónu. Pracuje na stejném principu a pochází ze starověku. Až do dob Mikuláše Koperníka byla tato pomůcka standardním vybavením všech astronomů. Dvě ramena se mohou pohybovat vůči sobě a jsou připevněna na gnómónu. Horní rameno mělo na každém konci průzory pro zaměření dané hvězdy. Na druhém rameni se pak odečítal úhel od zenitu (bod přímo nad pozorovatelem promítnutý na nebeskou sféru). Pokud nahradíme spodní rameno částí kružnice, získáme kvadrant, sextant, či oktant. Triquetrum poprvé popsal Ptolemaios někdy v polovině 2. st. n. l.
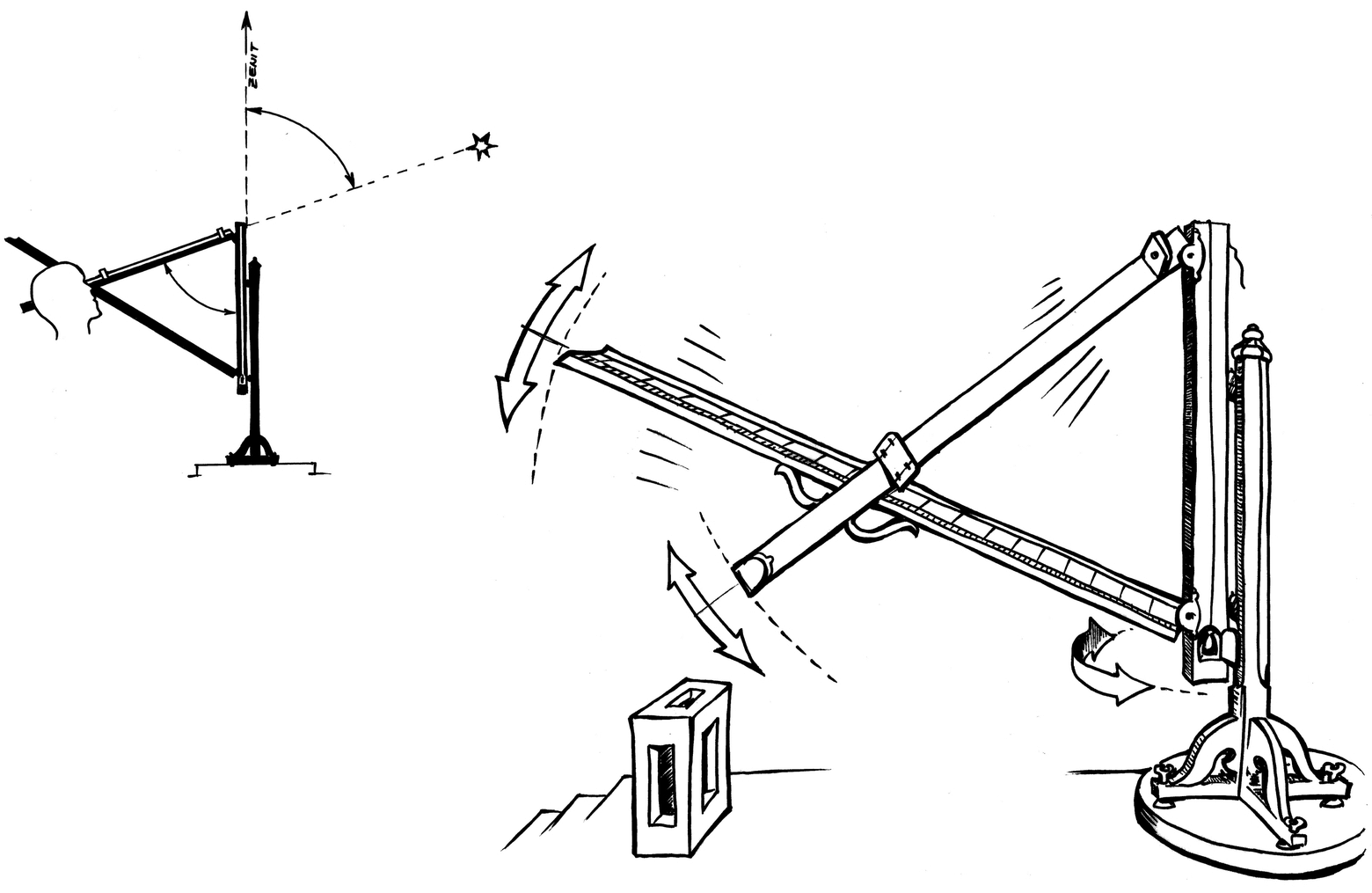
Ukázka použití triquetra
Kvadrant (2. st. n. l.)
Kvadrant, předchůdce sextantu, se používal stejně jako triquetrum pro měření uhlů hvězd od zenitu. V námořní navigaci se prosadily zejména ruční kvadranty, jelikož nástěnné nedávají na houpající se lodi moc smysl. Tak jako u všech předchůdců i následovníků se pro námořní navigaci používaly jasné hvězdy (například Polárka) a ve dne Slunce. Odměřovala se buď úhlová výška od horizontu, nebo úhlová vzdálenost od zenitu. Azimutální kvadrant byl přimontován na otočném podstavci a využití nacházel zejména v astronomii pro určování zenitových vzdáleností hvězd. V Evropě se první zmínka o kvadrantu objevuje v Ptolemaiově Almagestu kolem roku 150 n. l. Avšak první zmínky o použití sahají až do 15. st. př. n. l. do starověké Indie, kde ho použil jakýsi Rishi Atri pro pozorování Slunce.
Použití kvadrantu
Kompas (12. st. n. l.)
Kompas slouží k určování světových stran pomocí magnetického pole Země. Jedná se tedy o „magnetické“ světové strany. Toto je důležité si uvědomit při námořní navigaci, hlavně pokud počítáme náměry a snažíme se nastavit plavební kurz lodi. Z toho vyplývá, že není sever jako sever. Geografický sever se liší od magnetického severu, a aby to nebylo málo, tak ještě k tomu mění svou polohu podle toho, kde se právě na Zemi nacházíte, odklonu říkáme magnetická deklinace. Ještě spolu s dalšími vlivy jako například deviace, snos a proudy je nutné s magnetickou deklinací počítat při náměrech a určovaní vlastní polohy na moři. V Čechách je magnetická deklinace pro běžného uživatele map zanedbatelná – kolem 5°, ale kolem severní Ameriky nebo Afriky může nabývat hodnot až přibližně 25°, v jižním tichomoří se v podstatě podle kompasu plout nedá. Rozložení magnetické deklinace si lze graficky prohlédnout na stránkách NOAA. Jen pro informaci, magnetický pól Země se prohnal západně od geografického severního pólu Země kolem roku 2020 a zdá se, že nyní putuje do Ruska. První zmínka o kompasu opět nenáleží nikomu jinému, jak jinak, než Číně (dynastie Han) a je datována do 2. st. př. n. l. až 2. st. n. l. První námořní kompasy byly užity až mnohem později, a to okolo 9. st. n. l., opět v Číně. V Evropě se začaly „mokré“ kompasy používat díky anglickému teologovi Alexandrovi Neckamovi v roce 1190. Suché kompasy bez jakékoliv tekutiny pro plovoucí střelku se začaly objevovat až kolem poloviny 13. století.
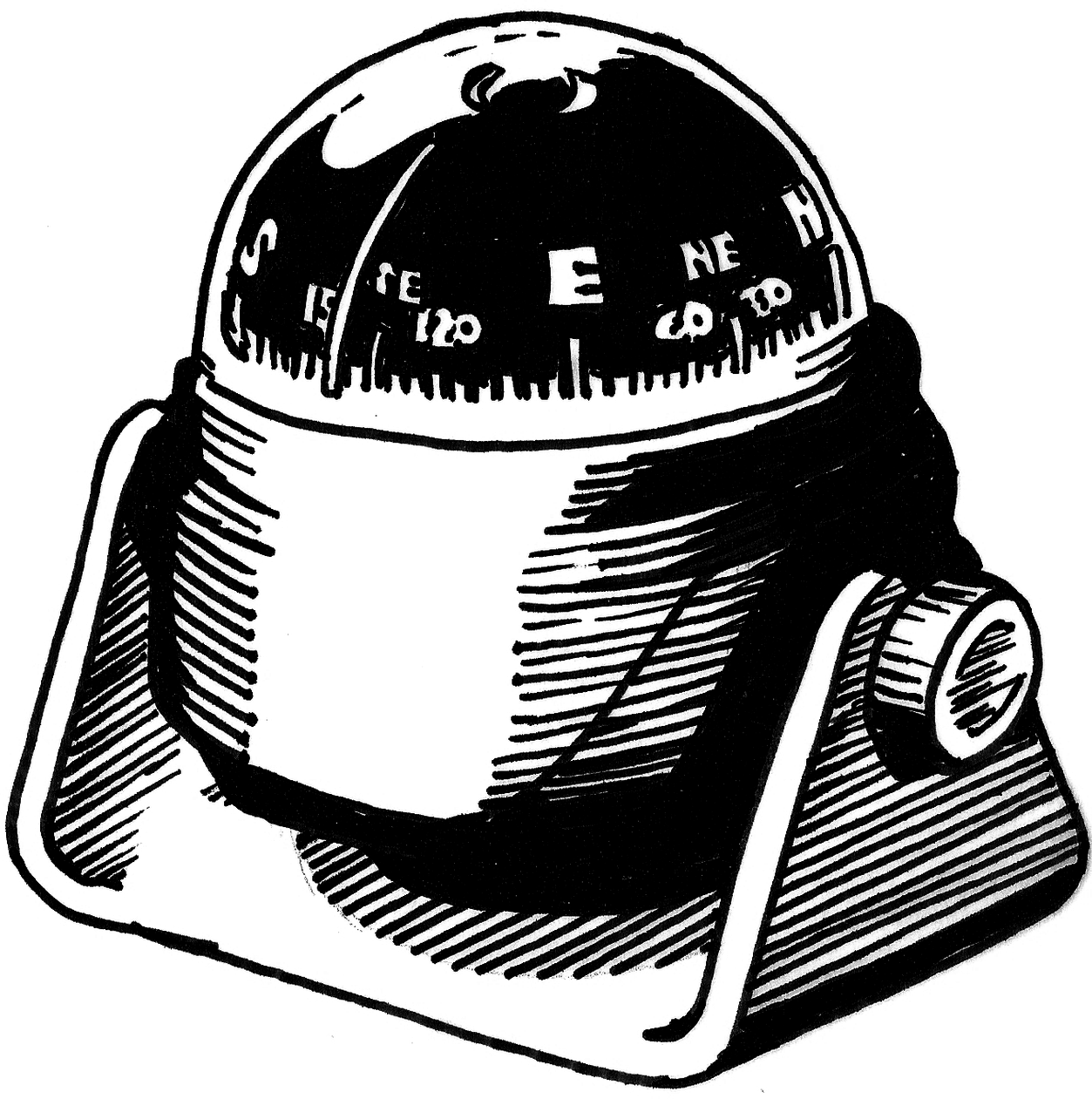
Námořní kompas
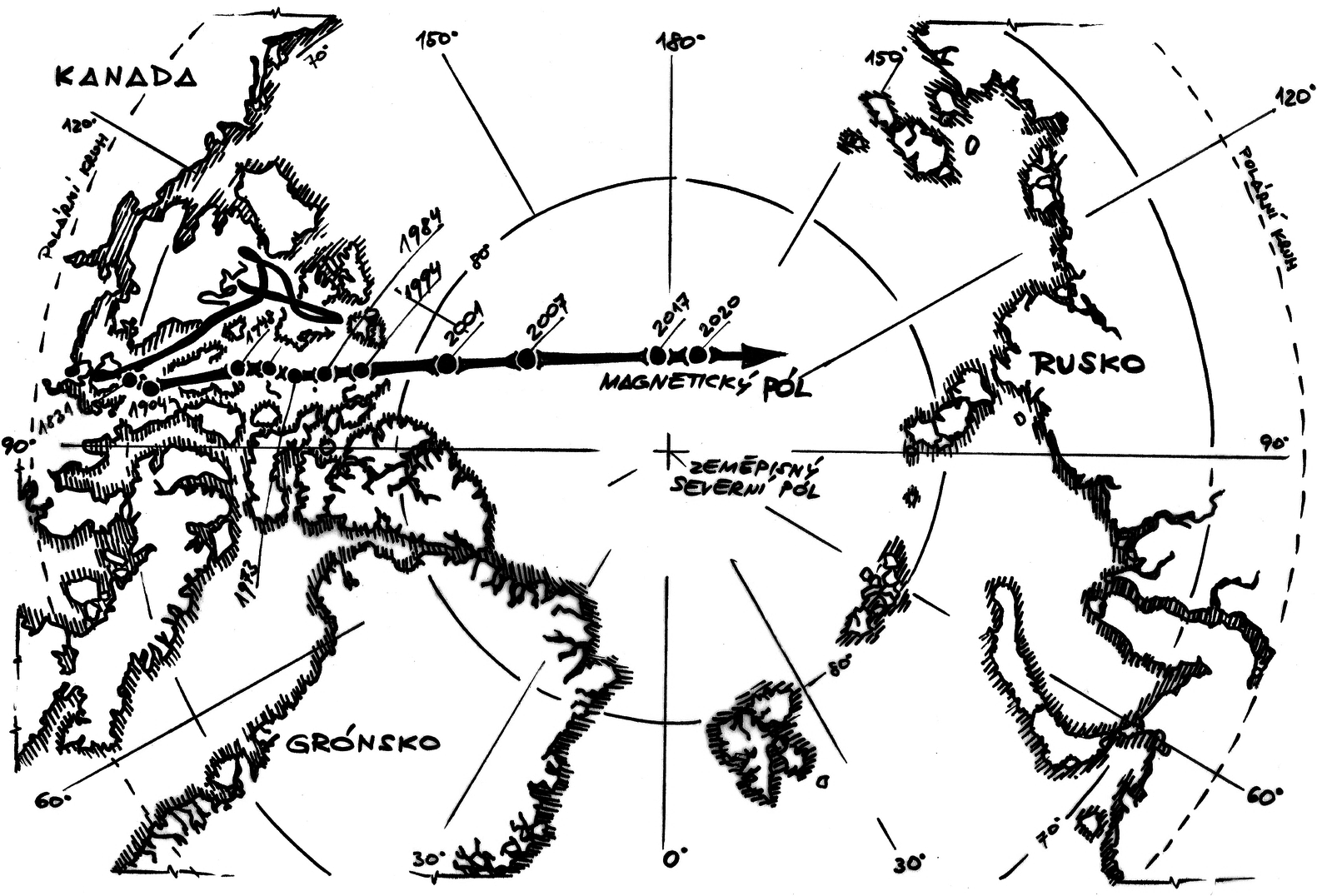
Pohyb magnetického pólu Země
Jakubova hůl (13. až 14. st. n. l.)
Jakubova hůl je jednoduché udělátko pro měření úhlů. Využití našla hlavně v astronomii a taktéž částečně k námořní navigaci. Díky velkému jasu Slunce ovšem použití hole k denní navigaci příliš nedoporučuji. Použití je následovné: konec tyče se přiloží k oku, aby oba měřené objekty byly v zákrytu konce posuvného břevna. Na hlavním ráhnu se potom ze stupnice odečte změřený úhel mezi objekty. V námořní navigaci nás zajímá hlavně horizont a Slunce. Naměřený úhel potom musíme odečíst v jednom z almanachů, který musíme mít při ruce. Pozice Slunce v pravé poledne v danou roční dobu (zapsanou v almanachu) nám potom pomůže při určení přibližné zeměpisné šířky a délky. Více si určování polohy pomocí aktuální pozice Slunce rozebereme v části o sextantu, pomocí něhož je navigace na moři nejvíce romantická a sexy. Vynález Jakubovy hole je připisován čínskému vzdělanci Šen Kua. V Evropě byla Jakobova hůl rozšířena díky matematikovi Levi ben Geršomovi ve 14. st. n. l. Název přebrala od francouzského židovského astronoma Jákoba ibn Tibbona ze 13. st. n. l.
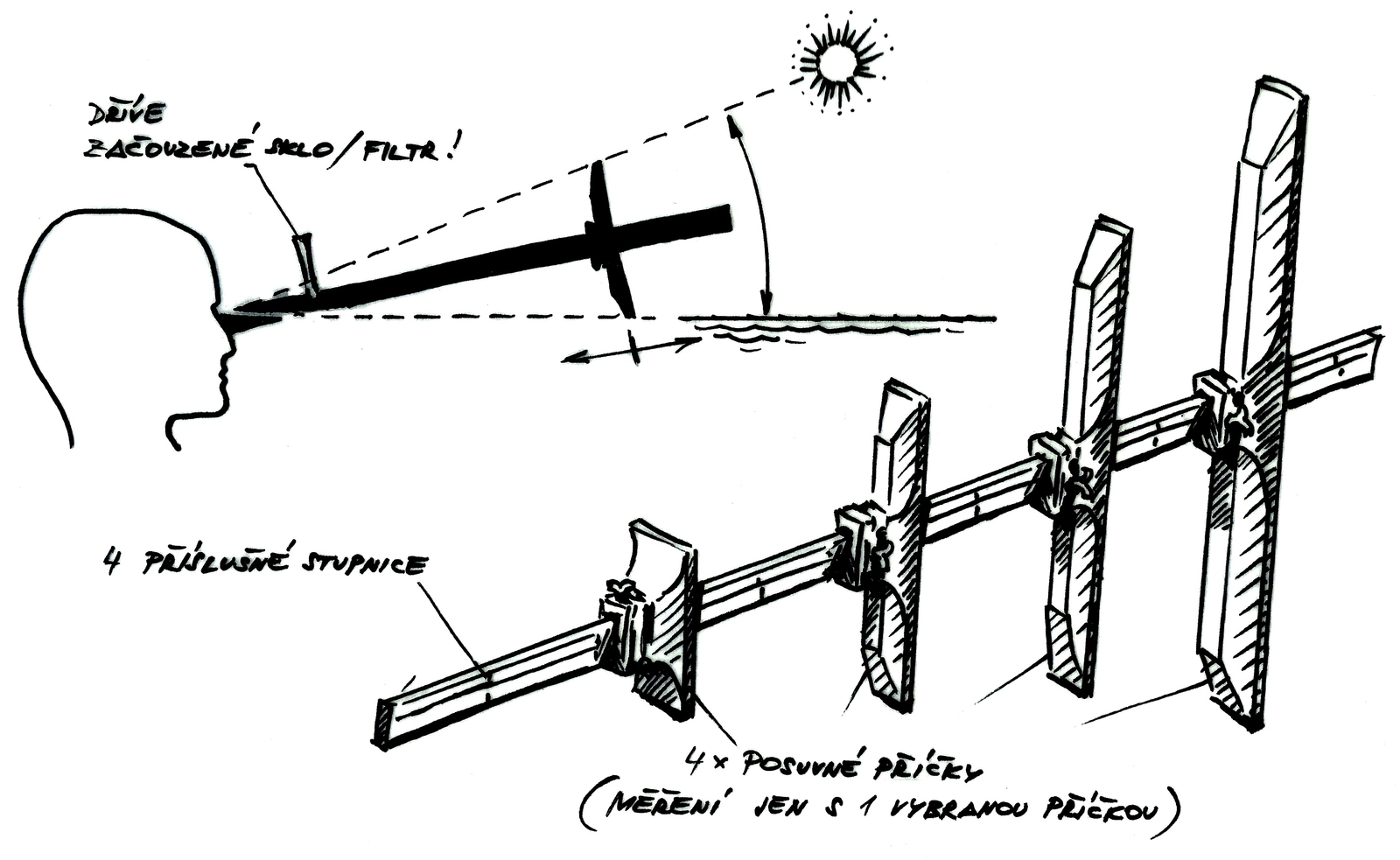
Jakubova hůl
Sextant (18. st. n. l.)
Konečně jsme se dostali k té nejromantičtější námořní navigaci, kterou nám dnešní doba může při určité konstelaci nabídnout. Nejedná se o žádný elektronický plotter, či chytrý telefon s aplikací. Ano, jedná se o sextant. Toto zařízení ale bohužel nemá nic společného s první částí slova sextant, může však při používání určitým lidem podobné pocity navodit. Jedná se o přístroj pro námořní a astronomickou navigaci. V tomto článku se omezíme pouze na navigaci na moři, stejné principy platí samozřejmě i na pevnině. Nejpřesnější sextanty dokážou měřit s přesností 0,1´. Sextant je složen z pevné části se stupnicí většinou od 0° do 120°, z pohyblivého ramene (alhidády), hledí (dalekohledu), indexového zrcátka, horizontového zrcátka, filtrů a mikrometrického bubínku. Jeho stupnice však ve skutečnosti vytíná úhel „pouze“ 60° a právě proto se mu říká sextant. To je dáno dvojitým odrazem přes indexové a horizontové zrcátko. Na stupnici tedy odečítáme skutečný úhel mezi dvěma objekty (nejčastěji horizontem a Sluncem), i přestože ve skutečnosti je úhel na stupnici poloviční. Princip sextantu objevil nejspíše Isaac Newton kolem roku 1730, avšak svůj objev neposlal do světa.
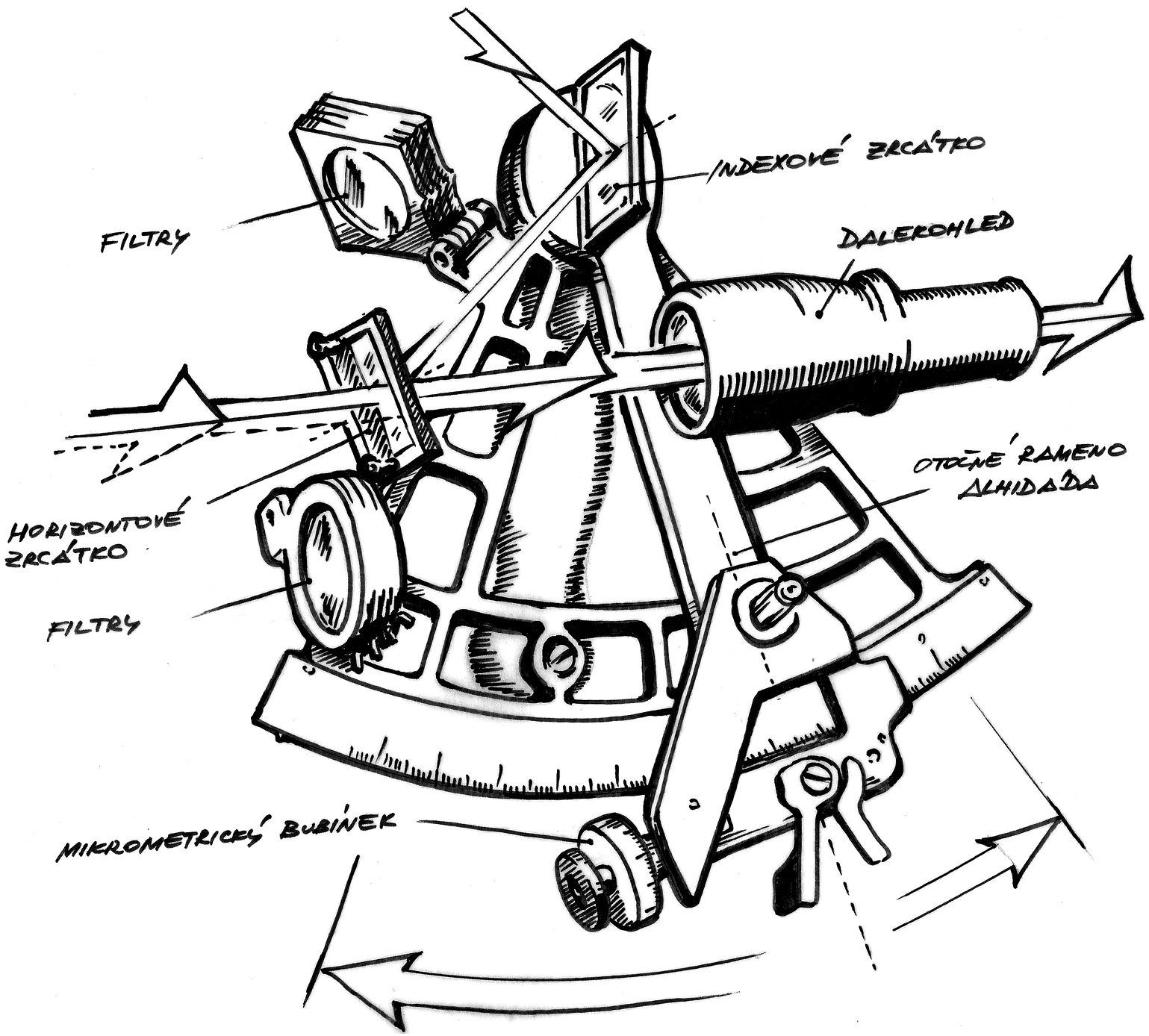
Sextant
K tomu, abychom mohli efektivně pracovat se sextantem a následně určit svojí aktuální polohu na naší společné matičce Zemi, je potřeba si uvědomit pár pojmů, neboli domluvených výrazů, kterými se budeme v následující části popisu práce se sextantem dorozumívat.
Obzorníkové souřadnice
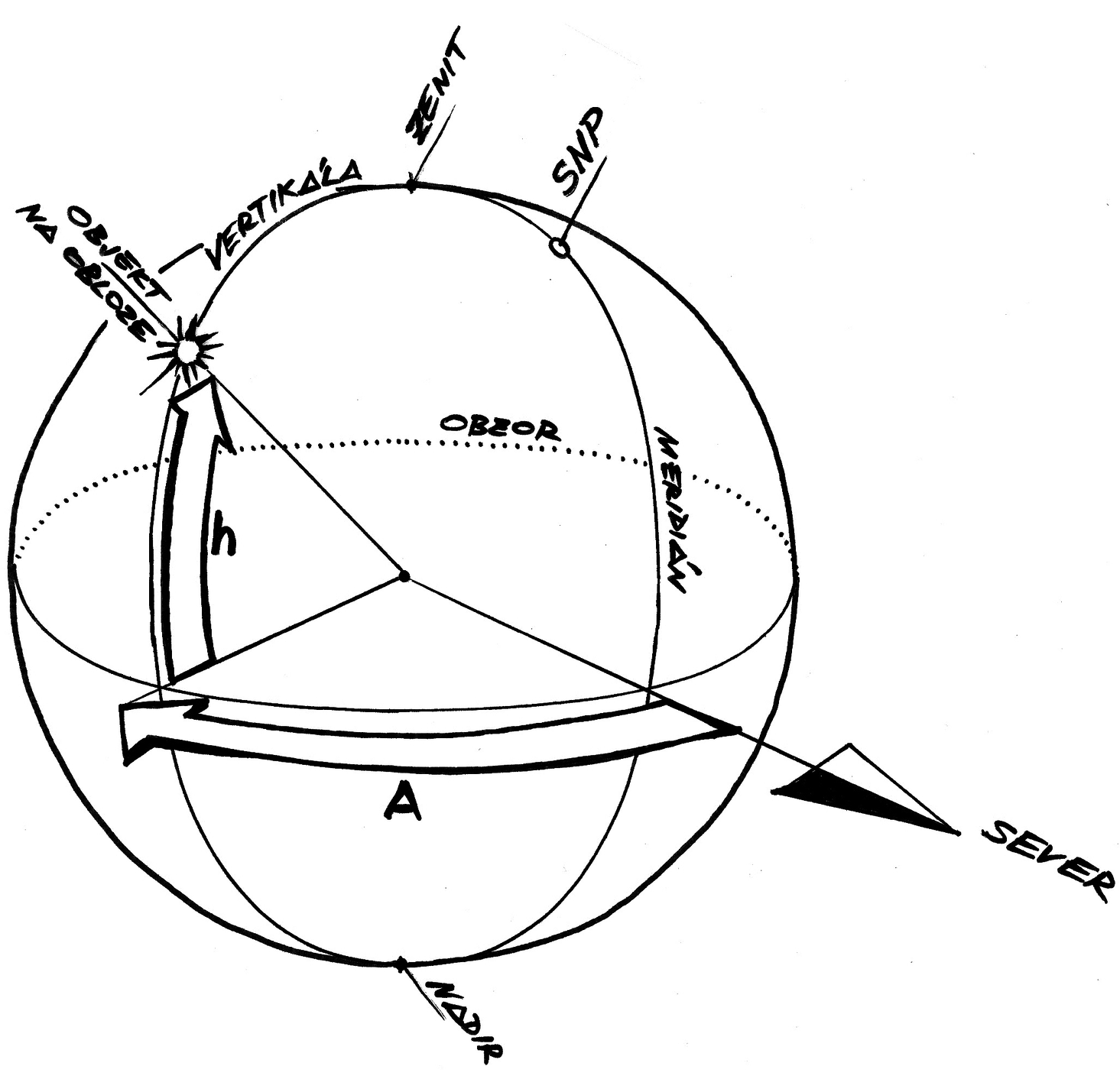
Obzorníkové (azimutální) souřadnice
Obzorníkové (azimutální) souřadnice jsou dané azimutem A a úhlovou výškou h a slouží pro určování polohy nebeského tělesa.
Azimut (A) je definován jako úhel mezi meridiánem a výškovou kružnicí protínající aktuální polohu pozorovaného nebeského tělesa. Nabývá hodnot 0° až 360° a měří se ve směru od severního bodu, dále pak na východ, jih a západ. Severní bod je bod protínající meridián na severním obzoru.
Výška (h) je definována jako úhlová výška pozorovaného nebeského tělesa nad obzorem. Nabývá hodnot 0° až 90° pro nebeská tělesa nad obzorem, 0° až −90° pro nebeská tělesa pod obzorem.
Obzor (horizont) je kružnice, kterou vidíme na všechny směry, pokud se otáčíme kolem své osy na dané pozici na Zemi.
Světový nebeský pól (SNP) je průsečík nebeské sféry se zemskou osou otáčení. Tato osa neleží na stejné přímce s magnetickou osou. Magnetický pól postupně putuje po Zemi (migruje). Toto chování způsobuje tekutinové dynamo, které je zdrojem magnetického pole.
Nadhlavník (zenit) je bod na obloze, který leží přímo nad pozorovatelem.
Podnožník (nadir) je bod na obloze, který leží přímo pod pozorovatelem.
Vertikály jsou výškové kružnice kolmé k obzoru (horizontu).
První vertikála je vertikála orientovaná směrem východ-západ.
Meridián je vertikála orientovaná směrem sever-jih.
Rovníkové souřadnice
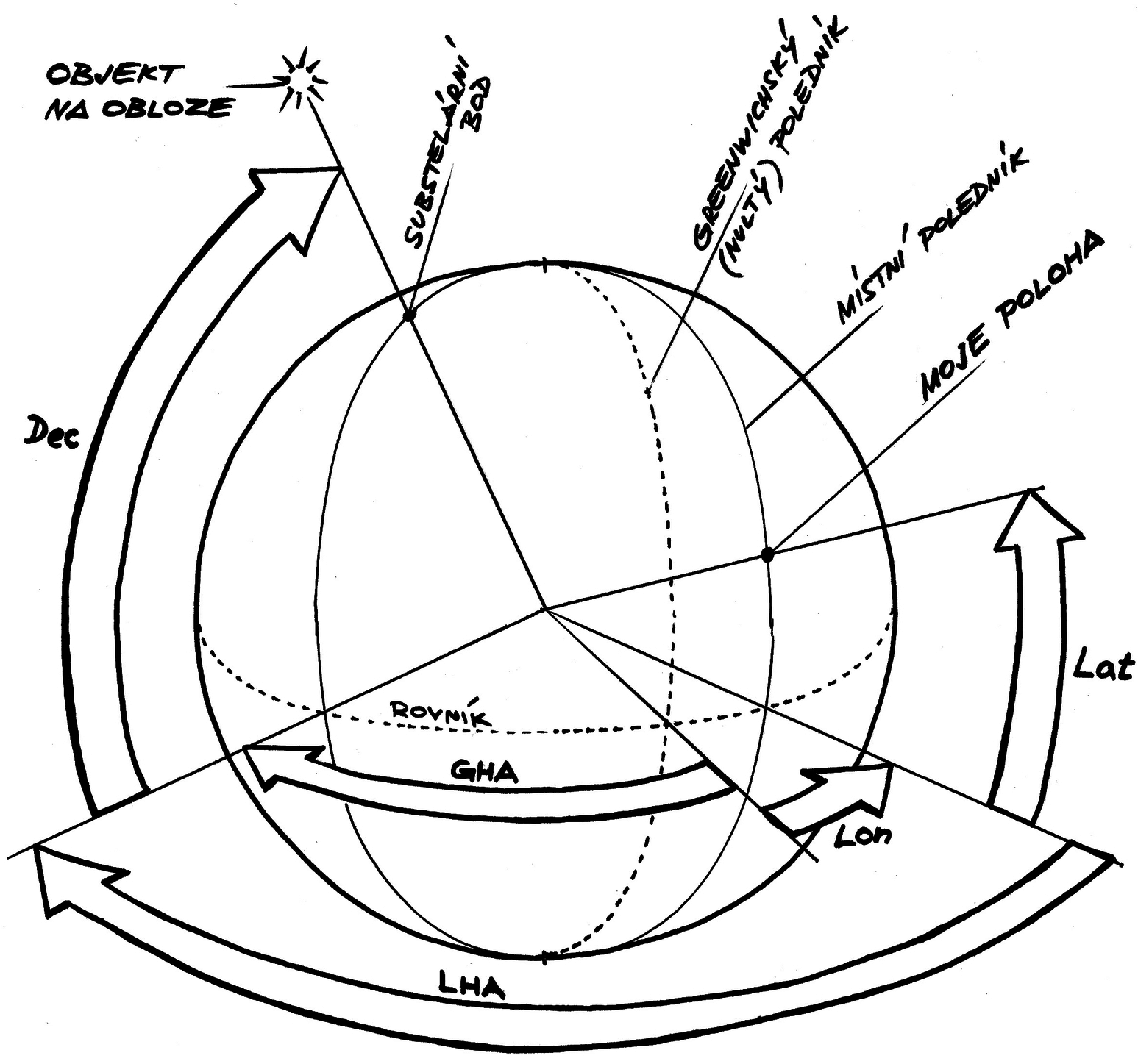
Rovníkové (ekvatoreální) souřadnice
Rovníkové (ekvatoreální) souřadnice jsou dané zeměpisnou šířkou (Lat) a zeměpisnou délkou (Lon) a slouží pro určování polohy na povrchu Země. Lat je zkratka pro Latitude a Lon pro Longtitude.
Lat (latitude) je zeměpisná šířka měřená od rovníku a nabývá hodnot buď severní šířka 0 až 90° (N), nebo jižní šířka 0 až 90° (S).
Lon (longtitude) je zeměpisná délka měřená od nultého poledníku a nabývá hodnot buď východní délka 0 až 180° (E) se znaménkem +, nebo západní délka 0 až 180° (W).
Substelární bod je bod, ve kterém protne přímka vedena objektem na obloze a středem Země bod na povrchu Země.
Rovník je nejdelší horizontální kružnice vedena na povrchu Země a je kolmá na poledníky.
Greenwichský (nultý) poledník je počáteční poledník, od kterého se počítá zeměpisná délka. Prochází Královskou observatoří v Greenwichi v Anglii (dnes jižní předměstí Londýna), podle toho se nazývá též Greenwichský poledník.
Místní poledník je poledník procházející polohou, kde se právě nacházíme.
GHA (Greenwich Hour Angle) je úhel naměřený mezi greenwichským (nultým) poledníkem a poledníkem protínajícím substelární bod. Směrem na západ nabývá hodnot 0° až 360°. Oproti východní zeměpisné délce má opačné znaménko. Východní zeměpisná délka se totiž, jak je uvedeno i výše, počítá od nultého poledníku na východ.
LHA (Local Hour Angle) je místní hodinový úhel naměřený mezi místním poledníkem a poledníkem protínající substelární bod. Při jeho výpočtu si musíme dát pozor na znaménko. LHA = GHA + Lon.
Práce se sextantem
Práce se sextantem a princip jeho používání
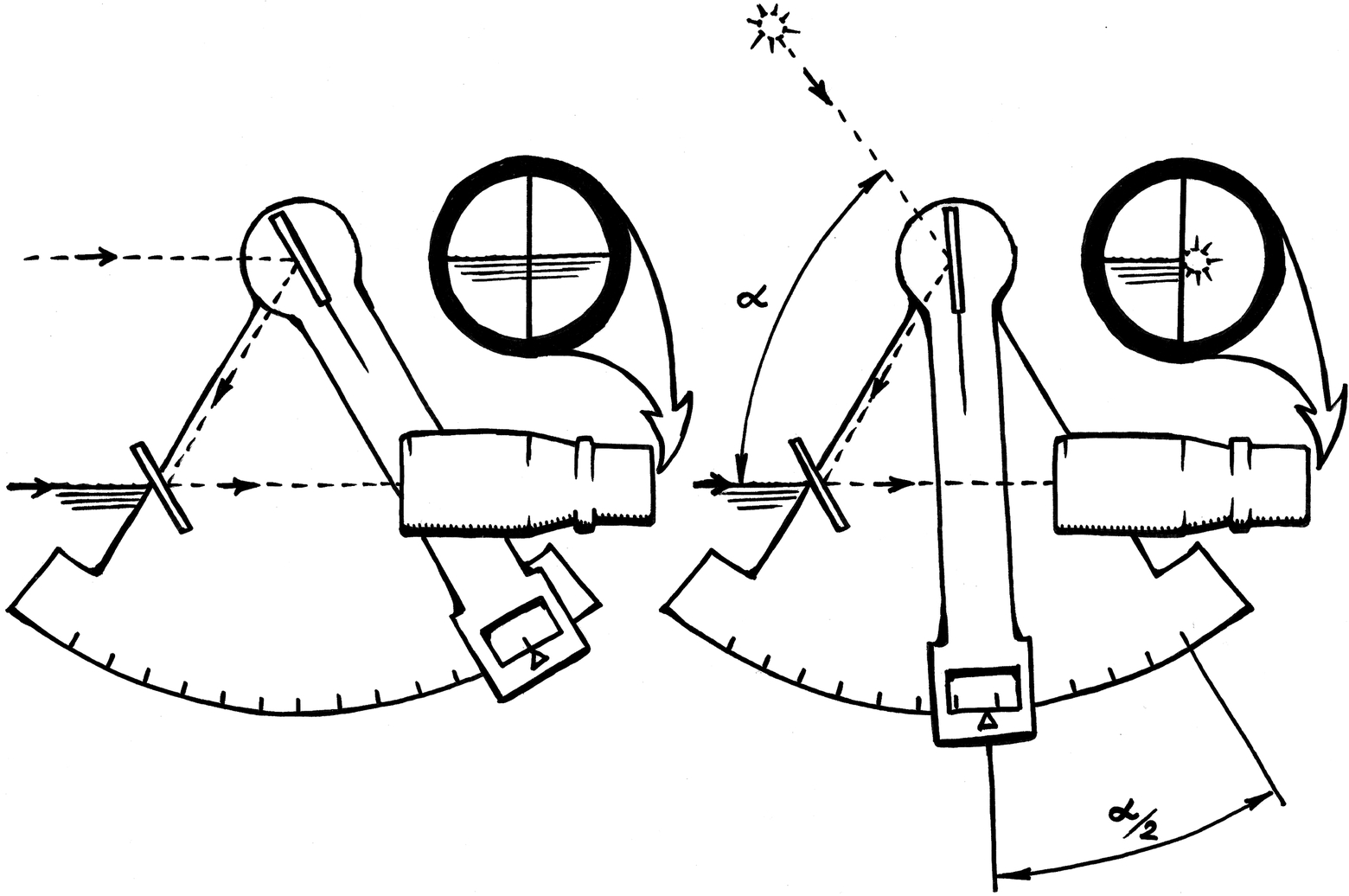
- Seřídíme sextant následujícími kroky. Vyrovnáme teplotu sextantu s okolím (cca 15 až 30 minut). Nastavíme alhidádu na 0°. U indexového zrcátka seřídíme jeho kolmost k rámu a nastavíme rovnoběžnost obou zrcátek. Seřídíme horizontové zrcátko, tak že se podíváme na horizont a pomocí horního šroubku srovnáme horizont. Sextant natočíme do vodorovné polohy a přejíždíme stranou zrcátka nahoru a dolů přes horizont, toto nastavujeme pomocí spodního šroubku horizontového zrcátka. Alternativní metodou je seřízení horizontového zrcátka pomocí Slunce, a to samozřejmě za použití filtrů, nechceme totiž dopadnout jako většina pirátů s jedním okem. Namíříme sextant přímo na Slunce a seřizujeme oba šroubky zároveň, dokud oba obrazy Slunce nesplynou za stálého kývání sextantu.
- Dále můžeme přistoupit k samotnému měření výšky nad horizontem. Nastavíme alhidádu na 0° a namíříme sextant na objekt na obloze (například Slunce) tak, abychom ho viděli v pravé polorovině. Odjistíme páčku alhidády a sjíždíme sextantem dolů a plynulým pohybem natáčíme alhidádu, tak aby nám zkoumaný objekt neutekl z hledáčku. Zajistíme páčkou alhidádu a vše doladíme pomocí bubínku. Sextant musíme držet ve vertikálním směru, jinak si vneseme do měření zbytečnou chybu. Alternativní možnosti měření úhlové výšky je využití hladiny klidného moře, nebo předmětu k tomu určenému, například domečku s kapalinou a průhlednými stěnami. Úhlová výška je potom rovna polovině změřeného úhlu na sextantu. Tímto měřením tedy získáme hodnotu úhlové výšky Slunce nad obzorem.
- Neméně důležitým faktorem je měření přesného času. Když budeme měřit čas s přesností na 1 s, tak to odpovídá přesnosti měření výšky 0,25´, přesnost času 4 s bude pak znamenat chybu 1´, a to odpovídá 1 námořní míli. V širém oceánu se s tím asi smíříme. Pro měření času je nejlepší mít hlásiče a zapisovače aktuálního času. Hlásič zahlásí přesný čas a v tu chvíli odečteme údaj ze sextantu. Čas i úhlovou výšku zapisujeme do přehledné tabulky.
- Musíme počítat i s korekcemi různých chyb, například chyby indexu, deprese horizontu (oči nejsou úplně přesně na hladině), refrakce neboli lomu světla v zemské atmosféře, průměru Slunce, paralaxy – levé a pravé oko pozorovatele svírá s měřeným objektem jiný úhel než s mnohem vzdálenějším středem Země.
- Odečteme naměřené hodnoty času v almanachu. Hlavními zkoumanými hodnotami budou GHA a Dec (deklinace) objektů používaných pro astronavigaci pro daný rok. Almanach je připravován na rok dopředu pro Slunce, Měsíc a 57 hvězd. Dále v almanachu najdeme i korekce chyby úhlové výšky, deprese a refrakce. Tímto jsme získali hodnoty GHA a Dec, ale pořád ještě neznáme naší polohu.
- Naší přibližnou aktuální polohu lze zjistit pomocí jedné ze známých metod (kulminace Slunce v pravé poledne, nebo metoda interceptu která se uplatní víceméně pouze v noci). Metoda kulminace Slunce je založená na měření úhlové výšky Hmax nad obzorem pomocí sextantu a následnému výpočtu pomocí Dec (deklinace) v době kulminace Slunce v pravé poledne (pozor: téměř nikdy to není přesných 12:00). Dec jsme získali odečtem času z almanachu. Při této metodě předpokládáme, že Slunce je tak daleko, že můžeme zanedbat nerovnoběžnost přímek naší pozice ke Slunci a středu Země ke Slunci. Pokud se trochu vyznáme v deskriptivní geometrii, tak si snadno odvodíme vzoreček pro výpočet zeměpisné šířky: Lat = 90° + Dec − Hmax (Slunce je na jih od nás) a Lat = −90° + Dec + Hmax (Slunce je na sever od nás). Pozor na znaménko Dec, které bude na jih od rovníku záporné. Zbývá nám určit zeměpisnou délku (Lon). Rozum dá, že při metodě kulminace bude Slunce na jih od nás a stejně tak i substelární bod, a tudíž jsou oba body (naše poloha a substelární bod) na stejném poledníku. Zeměpisná délka je až na znaménko shodná s GHA. GHA počítá s kladným znaménkem na západ, zatímco Lon počítá s kladným znaménkem na východ. Navíc GHA měříme s hodnotami 0°až 360°. Výpočet zeměpisné délky už bude tedy nasnadě, a to podle vztahu Lon = − GHA (pokud je GHA < 180°) a Lon = 360 − GHA (pokud je GHA > 180°). Metoda interceptu (respektive malého přírůstku) vychází z principu měření dvou objektu a protnutí kružnic, respektive pozičních linií, které jsou určeny pozorováním úhlových výšek těchto dvou objektů a následném zakreslení těchto pozičních linií do mapy. Jednalo se o nejpoužívanější metodu 20. století.
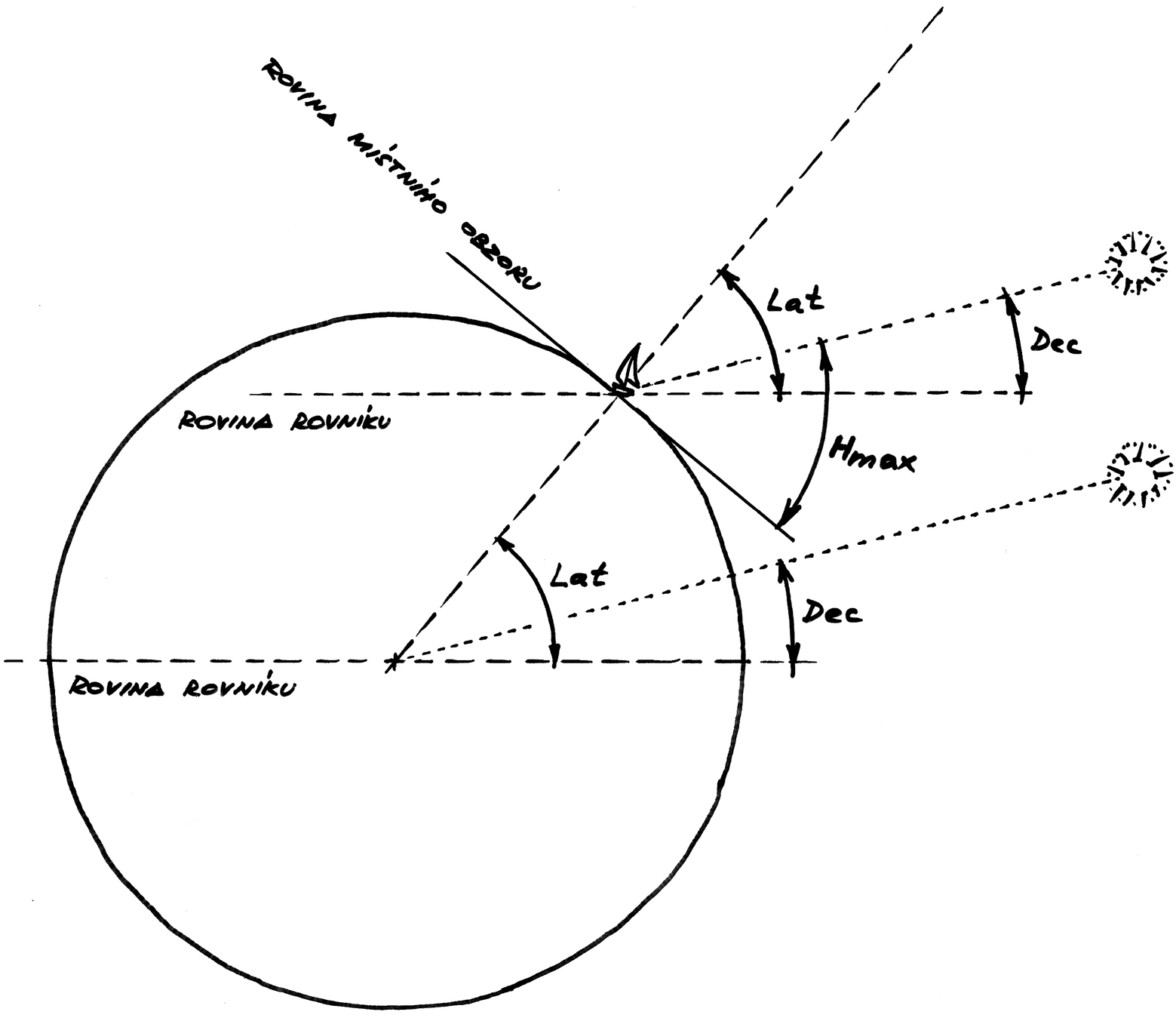
Nákres pro výpočet aktuální polohy
Příbřežní navigace pomocí náměrů
Měření aktuální polohy pomocí sextantu pro nás bude zajímavé a romantické na širém moři daleko od pobřeží. Blízko pobřeží totiž využíváme mnohem elegantnější metody zjištění naší aktuální pozice. Nehledě na to, že pokud se vyskytujeme ve vodách, které důvěrně známe, tak k navigaci nepotřebujeme nic, prostě víme, kde jsme. Pro určení naší aktuální pozice používáme okótovanou mapu a náměrové kompasy, pomocí kterých provádíme náměry na známé objekty na pobřeží (například majáky, výběžky, různé stavby, apod.). V praxi je nutné provést minimálně dva náměry, lépe tři pro zpřesnění polohy. Body či objekty na pobřeží by mezi sebou měly svírat úhel větší než 30° a menší než 150°. Příliš malý nebo velký úhel bude mít s velkou pravděpodobností za následek určení pozice s velkou nepřesností, a to buď moc blízko, nebo daleko od aktuální pozice směrem od náměrových bodů. Všechny náměry se snažíme provést v rychlém sledu po sobě. Tímto měřením získáme tzv. magnetický náměr. Zahrnutím magnetické deklinace, deviace, snosu větrem a prouděním a následným zákresem do mapy zjistíme protnutí těchto přímek (náměrů) přímo v mapě. Odečtením souřadnic z mapy můžeme určit naší polohu. K tomu se potřebujeme vyznat v základní geometrii, práci s náměrovým kružítkem a v neposlední řadě se také musíme dobře orientovat v mapě (tzv. pilotu). Musíme vědět, co je zeměpisná šířka a zeměpisná délka. Je nutné si pamatovat, že 1 NM (námořní míle) = 1´ zeměpisné šířky, to nám usnadní přenášení a odečty vzdáleností přímo v mapě. Náměry není nutné provádět každou chvíli. Vliv na to, jak často máme provádět náměry, bude záviset na více faktorech. Zejména na stylu plavby, jestli se jedná o dovolenkovou plavbu, nebo závody, jaké panuje počasí, či jak rychle se potřebujeme přesunout do cílové destinace. Předchozí informace nám posloužiliy k určení naší aktuální pozice. Stejně tak v opačném gardu počítáme a určujeme kurz, kam chceme plout. To znamená, že se podíváme do mapy, kde jsme, a potřebujeme nějak spočítat z opravdového kurzu kurz magnetický, abychom ho mohli předat kormidelníkovi. Při pohybu u pobřeží do 15 NM musíme také z map vyčítat a následně dávat pozor na tzv. izolované body nebezpečí. Zároveň musí kapitán a jím určení členové posádky sledovat okolí plachetnice a snažit se předejít jakékoliv srážce s jakýmkoliv předmětem či plavidlem. Reakce na nebezpečí je jedna věc, ale změnit kurz pod plachtami není záležitost na jednotky vteřin, spíše se bude jednat o vyšší desítky vteřin od zpozorování nebezpečí po ukončení úhybného manévru.
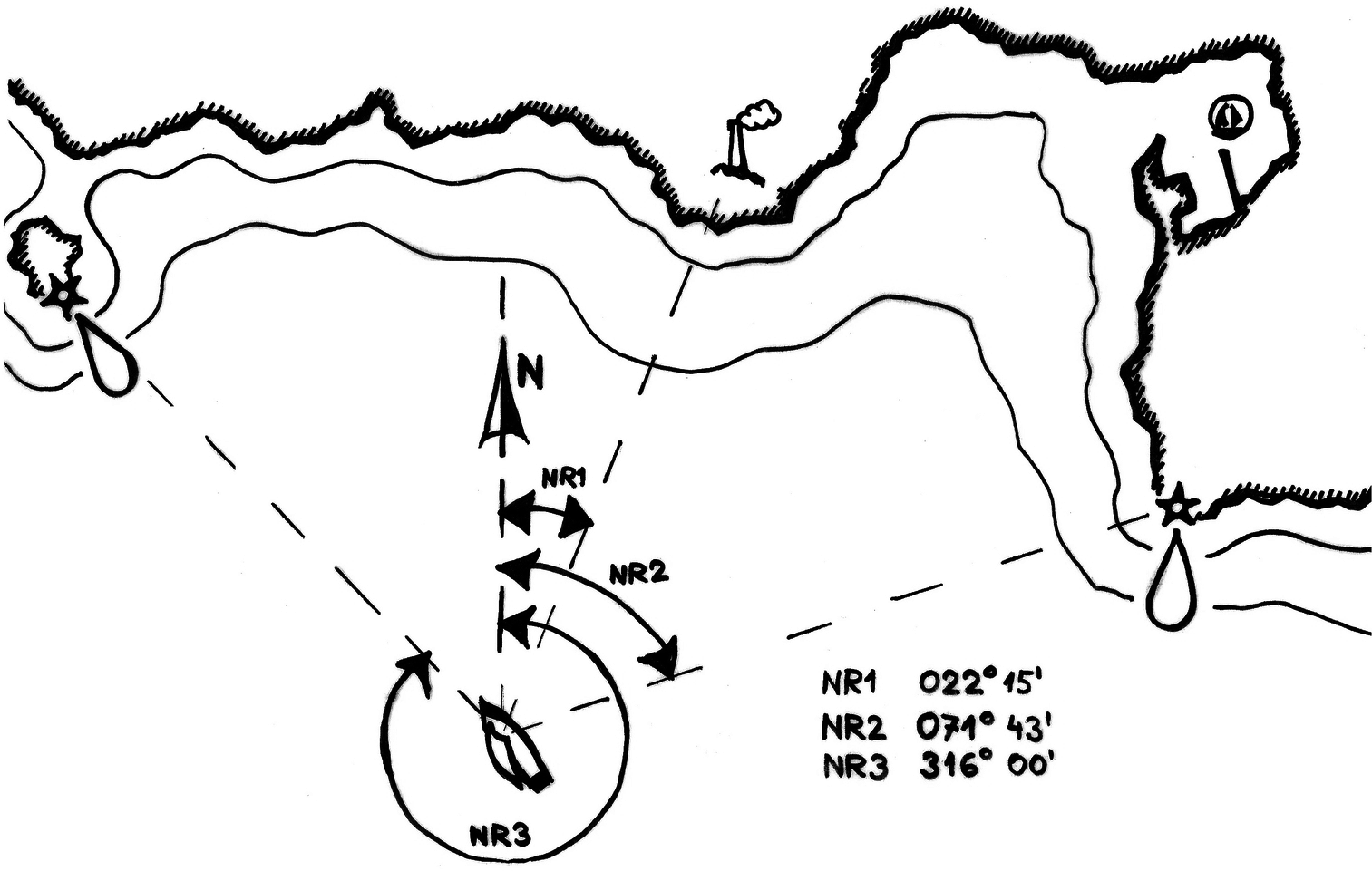
Náměry pro určení aktuální pozice
Gyrokompas (19. st. n. l.)
Jak už název napovídá, hlavní součástí gyrokompasu je setrvačník (gyroskop). Gyrokompas je složen ze dvou do koulí, z nichž jedna je do druhé vložena a spojena přes pohyblivá ramena. Rotující setrvačník je vložen do vnitřní koule a zavěšen na volném závěsu. Otáčky setrvačníku v námořním gyrokompasu jsou obvykle od 10 000 do 60 000 za minutu. Jakmile setrvačník dosáhne potřebných otáček, začne postupně stáčet svou osu otáčení ve směru místního poledníku, což se stane zhruba za 1 až 2 hodiny. Stáčení této osy je způsobeno otáčením a gravitací Země. Vzhledem ke své nákladné konstrukci se nachází zejména na drahých lodích. Na stabilitu a přesnost gyrokompasu má vliv více faktorů, jako například rychlost a manévrování lodi. Velmi názorný popis funkce gyrokompasu lze najít YouTube kanálu Causal Navigation.
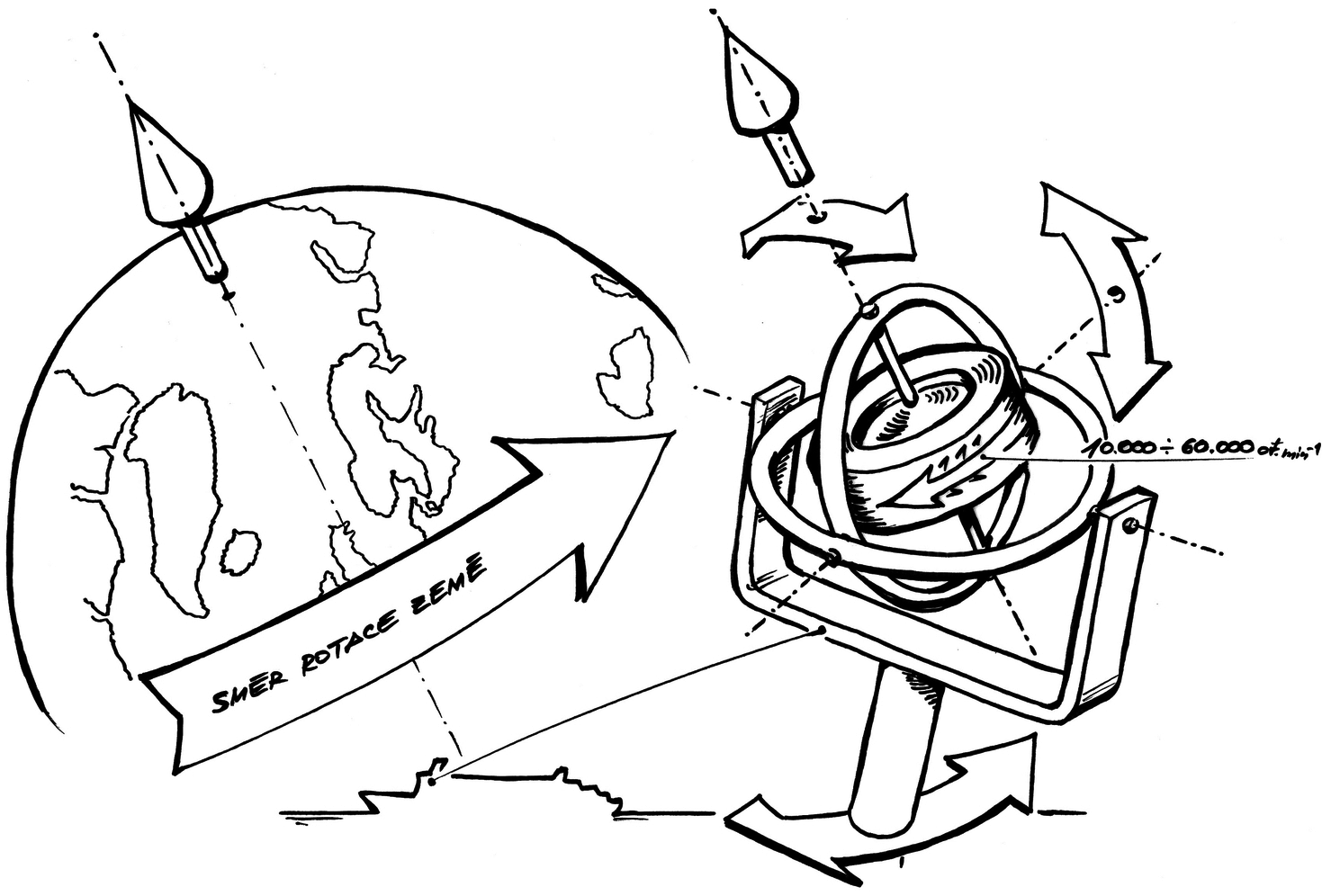
Gyrokompas
GPS, Galileo, Glonass
O „džípíesce“ by se dal napsat samostatný několikadílný článek, a proto si zde sdělíme pouze ty nejzákladnější údaje, které nám postačí k tomu, abychom někomu případně netvrdili, že „džípíeska je přece funkce mobilu, né“. GPS (Global Positioning System, česky globální navigační systém) je navigační systém založený na přijímání signálů z družic obíhajících Zemi ve výšce kolem 20 350 km nad povrchem na šesti kruhových drahách se sklonem 55° a posunutých vůči sobě o 60°. Na každé dráze se nepravidelně nachází 5 až 6 družic a pohybují se rychlostí cca 3,8 km/s. Na obrázku je vidět, jak jsou družice rozprostřeny na oběžných drahách, celkem jich je 31. Celý systém můžeme rozdělit na tři bloky: kosmický, řídící a uživatelský. Nás bude asi nejvíce zajímat ten uživatelský, tedy jak vlastně získáme naši velmi přesnou aktuální polohu. Všechny družice vysílají směrem k Zemi signály, jejichž součástí je velmi přesná časová značka a aktuální poloha dané družice. Uživatel pomocí nějakého zařízení, zpravidla chytrého telefonu, příjme tyto signály z několika družic, které jsou viditelné nad obzorem pozorovatele. Abychom byli schopni určit naší polohu v prostoru, potřebujeme přijmout signály z alespoň tří družic a provést triangulaci. Běžně však v otevřeném prostoru vidíme v každém okamžiku osm až deset družic. Díky tomu, že přijímáme signál z více než tří družic, lze naší polohu určit přesněji. Pomocí systému GPS můžeme zjistit nejen naší velmi přesnou aktuální polohu, ale velmi přesný čas, jelikož se na každé družici nachází troje až čtvery atomové hodiny s rubidiovým oscilátorem. Velkou zajímavostí, kterou většina běžného obyvatelstva neví, je, že se na palubách GPS družic nachází i optické, rentgenové a elektromagnetické detektory, které mohou odhalit start balistických raket. Tato funkce je však dostupná pouze americké armádě. Ve vesmíru neobíhá matičku Zemi pouze americký systém, ale i evropský Galileo a ruský GLONASS. Všechny systémy mají svá specifika a různé přesnosti. Co se týká námořní navigace, tak zde obzvláště platí Murphyho zákony. Pokud máte s sebou na lodi pouze jeden chytrý mobil, tak vám s největší pravděpodobností odejde do křemíkového nebíčka právě, když ho nejvíce potřebujete. Případně ho utopíte při focení kolem plujících delfínů. Někteří mořeplavci nedají na GPS systém dopustit, a proto pro strýčka příhodu vozí na lodi několik zařízení zabalených ve vakuovaných sáčcích. Ano, tím vyloučíme chybu zařízení, ale co když nám odejde do věčných křemíkových lovišť družicový navigační systém, co si potom počneme. To ví snad jen déšť a vítr kolem…
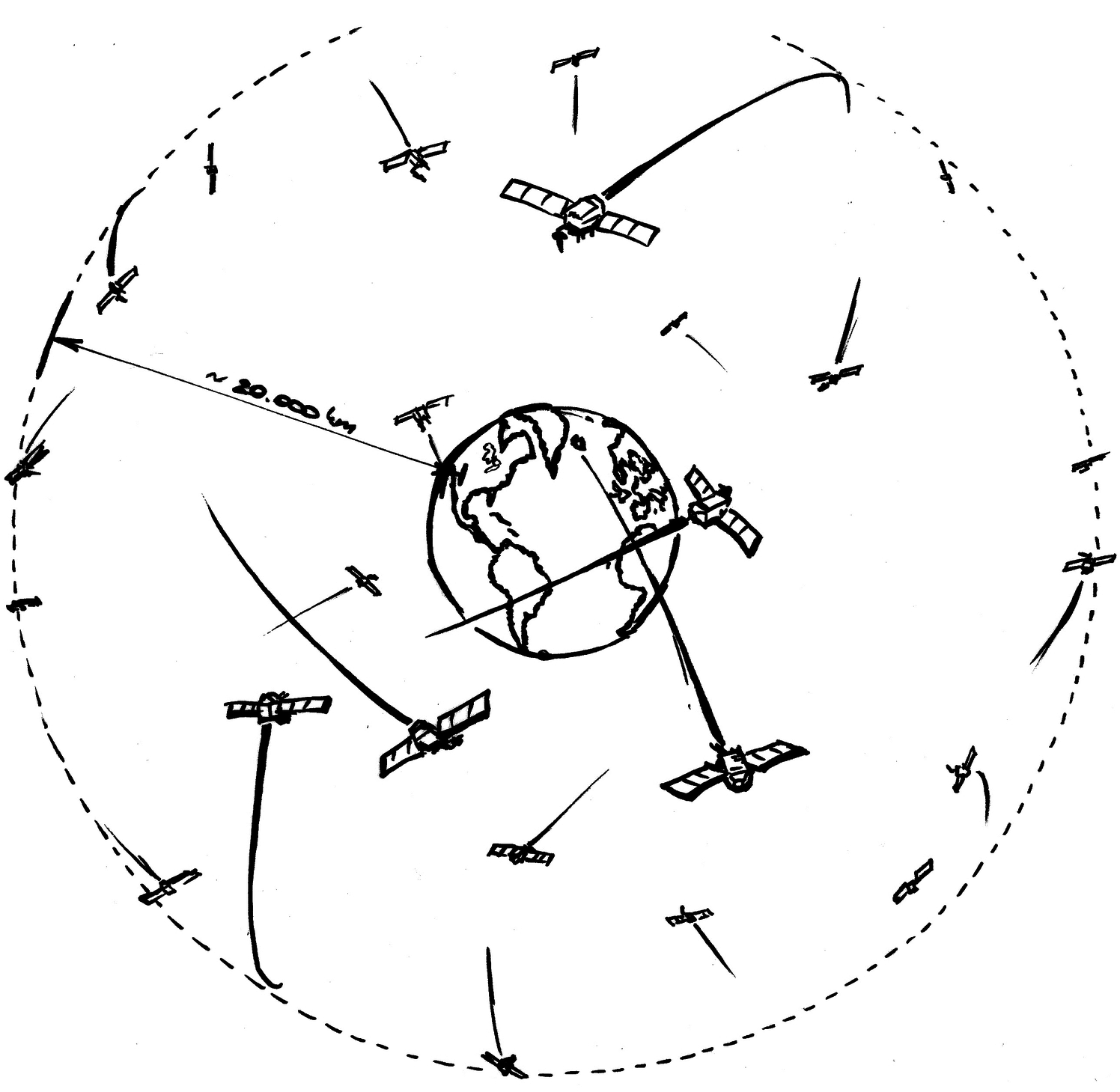
Družice GPS
Určení polohy pomocí GPS
Závěr
Závěrem bych chtěl vyjádřit velké díky ilustrátorovi obrázků tohoto článku Pavlovi Babkovi. O námořní navigaci bylo sepsáno mnoho knih. Taková nejucelenější je kniha od Toma Cunliffa, který moři věnoval a stále věnuje opravdu celý život. V knize nejsou zaznamenány pouze informace o námořní navigaci, ale v podstatě všechny ucelené informace, kterými by měl zkušený námořník vládnout. Námořní navigace jako taková se dá shrnout, jak je uvedeno v článku, do dvou částí: jednak musí každý námořník vědět, kde se nachází, a za druhé si musí umět stanovit kurz, kam popluje. Všechno s sebou nese určité znalosti, základní selský rozum a dobrodružného námořnického ducha. Loď nemá ruční brzdu, takže si v případě nouze či špatných povětrnostních podmínek nemůže námořník jen tak říci, „támhle“ si odpočinu a půjdu se do podpalubí prospat. Na moři je nutné umět plánovat, předpovídat počasí, vnímat náladu a připravenost posádky a podle toho potom určovat následné kroky. I přestože se zdá, že romantické plachtění je dovolenková záležitost, tak pravý opak je pravdou. Kapitán námořní jachty či jiné lodi musí být v každý okamžik plavby soustředěný a mít vždy připraven náhradní plán a vidět o několik kroků vpřed, musí být také dobrým psychologem, aby se posádka nezhroutila při prvním problému. Tento článek měl za cíl popsat různé navigační přístroje od „počátku“ času až do dnešní ultramoderní technologické éry a nastínit základní práci s nejpoužívanějším navigačním přístrojem ještě ve 20. století, tedy sextantem. Příště bychom si mohli povědět třeba něco o trimování a nastavení plachet, jak se pluje proti větru, co je to halza a případně další zajímavé informace, které se týkají oplachtění a jak to souvisí s fyzikálními zákony. Na úplný závěr bych rád do prostoru vyslal díky námořníkům, kteří formovali a někteří z nich stále formují český námořní jachting. O těchto lidech je dobré vědět a případně si o nich dohledat další informace. Jsou to lidé, kteří v námořním jachtingu něco dokázali. Tím se můžeme alespoň na chvíli soustředit na skutečné a opravdové příběhy a nikoliv na lidi, kteří nám jsou denně předhazováni v masmédiích. V první řadě je to asi nejznámější český mořeplavec Richard Konkolski. O jeho životě si lze poslechnout nádherné povídání na rádiu Universum. Dále bych zmínil Jirku Zindulku a tým lidí kolem něj. Nesmíme zapomenout ani na Jirku Denka. Oba dva mají obrovské zkušenosti v plavbách po celém světě a jejich povídání o uskutečněných plavbách jsou vždy takovou třešničkou na dortu, až někdy z toho dobrodružství mrazí. Ještě bych rád zmínil naší českou nejznámější starodávnou jachtu La Grace. Kdo si o ní a její posádce bude chtít něco přečíst, určitě si s vyhledáním poradí. Pro mě byl úplně prvním kapitánem a mojí vstupenkou na námořní plavby mořeplavec Tomáš Jelen, který už bohužel pluje ve vodách a oceánech na druhém břehu. Nerad bych ale zapomněl na všechny námořníky, a to jak zkušené i začínající, a tímto je všechny zdravím – AHOY!!!
Odkazy
- Pavel Babka: Ilustrace obrázků tohoto článku
- Petr Scheirich: Astronavigace
- Tom Cunliffe: Kompletní Yachtmaster; IFP Publishing, 2021
- Radio Universum: Richard Konkolski
- Wikipedia: Gnomon
- Wikipedia: Triquetrum
- Wikipedia: Quadrant
- Wikipedia: Astrolabe
- Wikipedia: Earth's magnetic field
- Wikipedia: History of the compass
- Wikipedia: Global Positioning System
- Wikipedia: Galileo
- Wikipedia: GLONASS
- Wikipedia: Ahoy
![]()
![]()
