|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
Robotí hadí mrška v ledovém království
Petr Panchártek
V mnoha bulletinech jsme si představili průzkumné roboty, například ve vodě (AB 16/2021), v půdě (AB 39/2021) a ve vzduchu (AB 5/2022). Jak ale budeme prozkoumávat ledové světy na cizích planetách?
V poslední době velmi roste zájem o průzkum ledových měsíců, jako je Enceladus. Získávání vzorků však představuje výzvu kvůli extrémním podmínkám na povrchu nebo v ledových průduších. Vědci vyvinuli robota připomínající hada, nazývá se EELS (Exobiology Extant Life Surveyor) a je schopný autonomní navigace na ledových površích. EELS má hlavu vybavenou senzory a kamerami pro pozorování okolí, zatímco tělo sestává z kloubových segmentů umožňujících měnit tvar a má šroubovitý povrch, který usnadňuje pohyb. EELS se ukazuje jako slibný nástroj pro autonomní průzkum složitého ledového terénu s ohledem na rizika.

Robot podobný hadovi byl úspěšně testován na různých površích. Zdroj: La Nacion.
|
Subglaciální – oblast nacházející se pod ledem nebo ledovou vrstvou. Termín se často používá v kontextu geologie, klimatologie nebo astrobiologie, kdy se zkoumá prostředí, ekosystémy nebo geologické procesy, které se odehrávají pod ledovými kryty, jako jsou například ledovce nebo ledové měsíce planet. Příkladem může být subglaciální oceán, který by mohl existovat pod ledovou vrstvou na měsících jako Enceladus nebo Europa. Exterocepce – proces vnímání podnětů z vnějšího prostředí. Týká se senzorických informací, které přicházejí z okolního světa, jako jsou zrak, sluch, hmat, čich a chuť. U robotiky a autonomních systémů exterocepce zahrnuje schopnost detekovat a interpretovat informace z prostředí pomocí senzorů, což je klíčové pro navigaci, plánování a rozhodování v dynamických a často neznámých podmínkách. Propriocepce – polohocit, schopnost vnímat polohu a pohyb vlastního těla, systému nebo jeho částí bez vnějších senzorů. Tato schopnost zahrnuje vnímání svalového napětí, pohybu kloubů a rovnováhy, což je umožněno pomocí vnitřních senzorů, jako jsou receptory ve svalech, kloubech a šlachách. U člověka je propriocepce nezbytná pro správnou koordinaci pohybu, registraci změny polohy těla atd. Anomální – události, situace nebo stavy, které se odchylují od normy nebo očekávaného chování. V kontextu výzkumu a techniky se často vztahuje na neobvyklé nebo neočekávané podmínky, které mohou mít vliv na výkon zařízení nebo systémů. Neholonomní – systém, jehož pohyb je omezen určitými restrikcemi, které nelze jednoduše vyjádřit v rámci standardních polohových nebo rychlostních parametrů. V praxi to znamená, že systém nemůže být kontrolován pouze prostřednictvím čistých změn polohy (např. pohyb po přímce), ale musí brát v úvahu i orientaci nebo jiné dynamické faktory. Takové systémy se často vyskytují v robotice a souvisejí s pohybovými omezeními, jako jsou například vozidla, která nemohou být otočena na místě. Holonomní – pohybový systém, který má plnou kontrolu nad svými stupni volnosti (směry pohybu). V praxi to znamená, že se takový systém může volně pohybovat v libovolném směru, aniž by byl omezen mechanickými vazbami nebo potřeboval provést jiné pohyby, aby dosáhl konkrétní polohy. Glaciální mouliny – svislé nebo šikmé otvory v ledovcích, které umožňují vodě z povrchu ledovce stékat dolů k jeho spodní části. Tyto otvory se vytvářejí, když se roztavená voda shromažďuje na povrchu ledovce a proniká do ledového tělesa prasklinami a trhlinami. Moulins mohou být velmi hluboké a mohou hrát důležitou roli v hydrologii ledovců, protože umožňují rychlý odtok vody, což ovlivňuje stabilitu ledovců a jejich pohyb. Leader/followers – vůdce/následovníci, v softwarovém inženýrství jde o rozšíření nebo variantu návrhového vzoru „Thread pool“ (bazének vláken). Řeší situaci, kdy je větší množství požadavků či událostí zpracováváno více vlákny, přičemž požadavků je více než vláken. |
Doposud známá fakta o ledových světech
Ledové měsíce plynných obrů, jako jsou Europa, Titan a Enceladus, jsou v popředí zájmu astrobiologie díky důkazům o podpovrchových oceánech. Ledový měsíc Saturnu, Enceladus, je obzvláště fascinující, protože se věří, že pod jeho zmrzlým povrchem se nacházejí kapalné oceány. Enceladus je unikátní nejen díky těmto oceánům, ale také proto, že má známé gejzíry, jeho oceán je pravděpodobně v přímém kontaktu s horninovým jádrem, které dodává minerály, a data z přeletů sondy Cassini naznačují možnou existenci hydrotermálních průduchů. Detekce biologických stop by mohla být možná ze vzorků zachycených během průletu přes gejzíry nebo při přistání na povrchu. Přesto však dosavadní studie ukazují, že na některé klíčové astrobiologické otázky nelze odpovědět bez přímého odběru vody z oceánu přes průduchy. Hledání a charakterizace těchto biologických stop, a tedy i života na Enceladu, by ideálně vyžadovalo odběr vzorků z průduchů, jejich okolí a samotného oceánu.
Existují jen velmi omezené znalosti o vnitřním prostředí průduchů a povrchu
kolem nich, přičemž většina těchto informací pochází z jediné mise – CassiniCassini – meziplanetární sonda NASA, ESA a ASI (Italská kosmická agentura) určená k průzkumu Saturnu. Startovala z Cape Canaveral 15. října 1997, k Saturnu dorazila 30. června 2004. Celková hmotnost Cassini (včetně paliva a pouzdra Huygens) při startu byla 5 600 kg. Vyvrcholením mise bylo měkké přistání pouzdra Huygens na povrchu Saturnova měsíce Titanu dne 14. ledna 2005. Sonda byla pojmenována podle italského matematika a astronoma Giana Domenica Cassiniho (1625-1712). Podle tohoto vědce je pojmenována i část Saturnových prstenců, tzv. Cassiniho dělení. Mise
byla ukončena 15. září 2017 řízeným pádem sondy
do atmosféry planety.. Nejlepší dostupné rozlišení povrchových snímků je přibližně 6 metrů na pixel a
pokrývá jen velmi omezenou oblast. Většina detailních snímků je navíc
monokulární, takže topografie povrchu v měřítku odpovídajícím našim robotům
zůstává převážně neznámá. Dále existuje několik vzájemně si odporujících hypotéz
ohledně mechanizmů erupcí, které nelze pomocí stávajících dat z mise Cassini
vyřešit. Výsledkem je, že geometrie průduchů, hloubka k rozhraní kapaliny (pokud
existuje), rychlost proudění a fyzikální vlastnosti ledových stěn zůstávají z
velké části neurčené.
Prozkoumávání nejistého ledového prostředí Enceladu bez předchozí mise vyžaduje vývoj odolných autonomních robotických systémů schopných operovat, navigovat a přizpůsobovat se náročným podmínkám. Například apriorní znalosti prostředí a vlastností či dynamiky terénu jsou velmi omezené, což během navigace a provozu vede k vysoké míře nejistoty a rizika. Odběr vzorků z podpovrchového oceánu si vyžaduje navigaci a průzkum jak na povrchu, tak pod ním, přičemž podmínky prostředí a fyzikální vlastnosti ledu či okolního terénu se mohou výrazně lišit v průběhu trajektorií mezi povrchem a podzemím. V případě průzkumu pod povrchem se navíc přidávají faktory, jako je omezená viditelnost při průchodu úzkými průduchy a potenciálně turbulentní proudění v průduších. Komunikace se Zemí je omezena kvůli velkým vzdálenostem (zpoždění signálu na obousměrnou komunikaci bude mezi 130 a 155 minutami, zatímco přenosová rychlost bude značně nižší než u misí na Mars). Situaci také komplikuje absence přímé viditelnosti, když se systém nachází pod povrchem. Životnost systému může být omezena náročnými podmínkami prostředí, jako je radiace, extrémní teploty nebo omezené zdroje, například vyčerpatelné baterie. Tyto okolnosti vylučují možnost ručního řízení robota z povrchu Země v takovém prostředí. Průzkumný robot proto musí být vysoce autonomní, adaptivní a odolný, aby mohl misi vykonat s omezeným nebo zcela nulovým dohledem ze strany člověka.
Řešením může být autonomní, adaptabilní a odolná robotická platforma EELS (Exobiology Extant Life Surveyor), vyvinutá v NASA JPLNASA JPL – Jet Propulsion Laboratory, oddělení NASA zabývající se konstrukcí raketových pohonů. NASA – National Aeronautics and Space Administration, americký Národní úřad pro letectví a kosmonautiku, založen byl v roce 1958. Jde o instituci zodpovědnou za kosmický program USA a dlouhodobý civilní i vojenský výzkum vesmíru. K nejznámějším projektům patří mise Apollo, která v roce 1969 vyvrcholila přistáním člověka na Měsíci, mise Pioneer, Voyager, Mars Global Surveyor a dlouhá řada dalších., která má za cíl čelit výše zmíněným výzvám a potřebám.

Umělecké ztvárnění konceptu EELS Nahoře: Systém se po nasazení přistávacím modulem na Enceladu pohybuje pomocí svého aktivního pohonu kůže směrem k průduchu. Dole: Platforma EELS sestupuje do pramene a odolává vzestupnému dynamickému tlaku kapaliny tím, že se tlačí proti ledovým stěnám. Zdroj: NASA/JPL-CALTECH.
Tým v Jet Propulsion Laboratory NASA vyvíjí a testuje hadovitého robota nazvaného EELS (Exobiology Extant Life Surveyor). Tento univerzální robot, inspirovaný snahou sestoupit průduchy na ledovém měsíci Saturnu Enceladu a vstoupit do podpovrchového oceánu, je navržen tak, aby autonomně mapoval, procházel a zkoumal dosud nepřístupná místa na Zemi, Měsíci a dalších tělesech naší Sluneční soustavy. Zdroj: NASA Jet Propulsion Laboratory.
Projekt EELS
Robot EELS je mobilní instrumentální platforma ve tvaru hada, navržená k průzkumu jak povrchových, tak podpovrchových struktur, hodnocení obyvatelnosti prostředí, a nakonec k hledání důkazů o životě. Je navržen tak, aby byl adaptabilní pro překonávání terénů inspirovaných oceánskými světy, uzavřených labyrintových prostředí a tekutých médií. Enceladus je hlavním motivem pro návrh hardwarové a softwarové architektury EELS, stejně jako jeho mobility a autonomních schopností. K vývoji a testování jeho architektury používáme ledovce jako analogická ledová prostředí na Zemi, která slouží jako krok k přípravě na Enceladus.
Mise zaměřené na průzkum planetárního podpovrchového ledového prostředí, které mají podobné vědecké cíle jako EELS, byly navrhovány v průběhu let. Hlavní metodou pro překonání planetárních ledových vrstev je termální vrtání pomocí tavných sond. Společným rysem těchto návrhů misí je, že mobilita probíhá skrze masivní led, což představuje výzvy vzhledem k několikasetkilometrovým kryogenním ledovým vrstvám Enceladu nebo Europy. Termální vrtání v kryogenním ledu je neefektivní, protože dochází ke ztrátám tepla bočními stěnami sondy a k hromadění sedimentů, což může snížit tepelnou vodivost. Budoucí výzvou je i možná přítomnost kamenů nebo dutin v ledové vrstvě. Dalším přístupem jsou mobilní systémy schopné překonávat drsný glaciální terén a sestupovat do ventilačních systémů. Zajímavý je koncept EVE (Enceladus Vent Explorer), který zkoumal proveditelnost využití ledových šroubů a artikulovaných paží jako technologie pro sestup. Podobně jako v EVE, tak EELS využívá existenci otevřené cesty k subglaciálnímu oceánu Enceladu a obchází problémy termálního vrtání v kryogenním ledu tím, že používá led jako terén, po kterém se pohybuje, místo prostředí, kterým by měl projít. Na rozdíl od EVE je EELS lépe přizpůsoben pro mobilní misi v systémech průduchů Enceladu, protože je schopný pohybu v širším spektru terénů. Vývoj EELS zahrnuje devět specifických schopností nezbytných pro umožnění mise průzkumu systémů průduchů na Enceladu:
- Proprioceptivní řízení pro spolehlivou interakci s ledovým povrchem a udržení robota v rychlém proudu,
- řízení chůze/pohybu pro plné využití dostupných stupňů volnosti a cestování různými typy prostředí,
- exteroceptivní vnímání pro získávání geometrických a sémantických informací o místním prostředí,
- plánování pohybu pro neustálé hledání realizovatelné cesty robota směrem k cílovým pozicím
- globální lokalizaci a mapování pro zajištění situačního povědomí v globálních souřadnicích,
- globální plánování pohybu pro kooptimalizaci cesty a vzoru chůze/pohybu
- vědecké snímání a akci pro pozorování, vzorkování a nasazení senzorů,
- plánování a robustní provádění aktivit na vysoké úrovni mobility, vědy a inženýrství a efektivní reakce na selhání
- řízení rizik k zajištění toho, že plán mise je prováděn v rámci rizikových prahů stanovených uživateli.
Vzhledem k vysoké nejistotě cílového prostředí hraje uvažování v podmínkách nejistoty napříč těmito schopnostmi centrální roli v projektu EELS a určuje požadavky na autonomii na úrovni systému.
Několik prací nastínilo budoucí potřeby autonomie a výzvy pro planetární průzkum. Společné rysy, které se vždy objevují při operacích v odlehlých oblastech Sluneční soustavy, jsou potřeby systémové autonomie a rozhodování v podmínkách nejistoty. Vysoká nejistota, spojená s dlouhou latencí komunikace, nízkou frekvencí cyklů uplink-downlink a krátkým časem mise, vylučuje klasické paradigma plánování s operátorem/zemí v procesu, které bylo dlouho přijímáno u vesmírných misí. Úspěšné operace na povrchu (a pod povrchem) Enceladu tedy budou vyžadovat systémového plánovače úkolů a pohybu, který si je vědom měnící se environmentální nejistoty a rizik, když je více prostředí vnímáno prostřednictvím aktivních pozorování.
Další žádoucí vlastností plánovače na úrovni systému pro extrémní prostředí je určitá míra povědomí o problému plánování pohybu robota. Při pohybu v nejistém prostředí, dochází k přirozenému kompromisu mezi riskováním, získáváním informací a využitím konečných zdrojů mise. Schopnost plánování na úrovni systému je ideálním koordinátorem pro tuto vyváženost, protože má nejširší pochopení stavu systému. Tím pádem by měla být schopnost plánování úkolů vědoma problému plánování pohybu na nižší úrovni v dostatečně vysokém rozlišení, aby generovala řídkou sekvenci navigačních úkolů, které rozkládají vědecký záměr dosáhnout průduchu na mezistupně pro proces plánování trasy.
Efektivní plánovač na úrovni systému by měl být také schopen odhadnout pravděpodobné důsledky rozhodnutí na základě předchozího přesvědčení a vyhodnotit riziko spojené s každou akcí. Měl by být schopen odvodit nejpravděpodobnější důsledek během navigace v prostředí a v případě potřeby přijmout vhodná opatření pro získání informací. U Enceladu je nezbytnost povědomí o riziku patrná, například ve fázi pohybu na povrchu. Při pohybu v ledovcovém prostředí existují nebezpečí různé míry selhání, od drobných nepříjemností, jako jsou malé prohlubně, až po trhliny, které mohou ukončit misi. Plánovač, který je schopen modifikovat svou toleranci vůči nejistotě na základě rizika, vytvoří plány, které mohou dosáhnout vyššího vědeckého výnosu s fixními náklady a bez zvyšování pravděpodobnosti katastrofických událostí. Tato schopnost plánovače umožní systému přizpůsobit své chování na základě rizik, která akce představují pro výsledek mise, s ohledem na stav systému a podmínky vnějšího prostředí. To je podobné operacím založeným na rizikové matici, které jsou v současnosti používány, ale v případě Enceladu by tato riziková matice vedla interní proces rozhodování. Mezi informace o stavu systému, které jsou potřebné pro přesné hodnocení důsledků, patří také pravděpodobnost selhání funkcí robota. Jednoduchým příkladem, proč tomu tak je, je robot, který se rozhoduje, zda vstoupit do trhliny. Pravděpodobnost, že bude mít funkční exterocepci při slabém osvětlení, by měla být určitě centrální součástí rozhodovacího procesu robota.
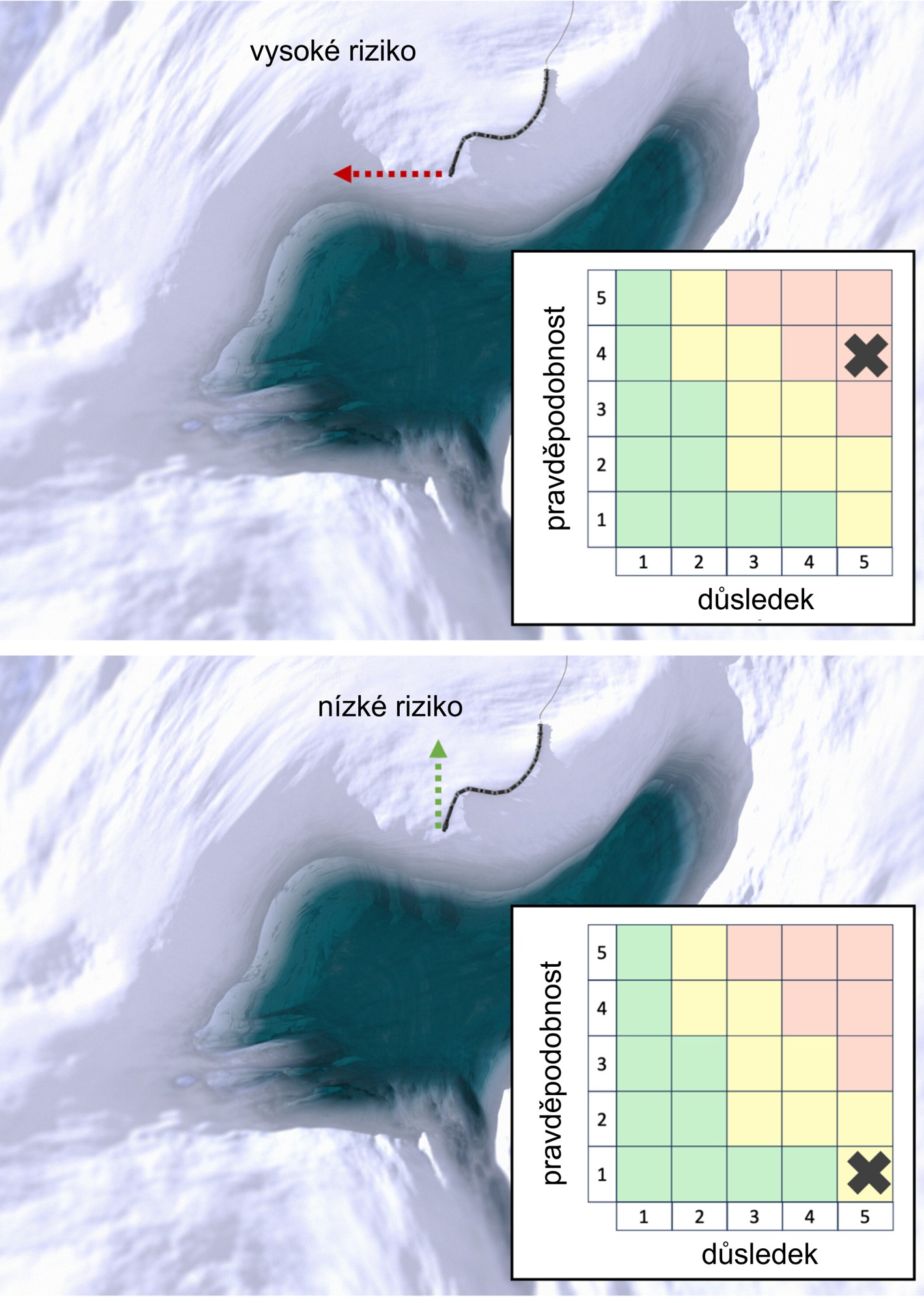
Interní hodnocení rizika. Pohybová akce je hodnocena z hlediska rizika. K výpočtu rizika lze použít matici, která násobí závažnost následků selhání pravděpodobností tohoto selhání. (A) Vysoké riziko kvůli vysoké pravděpodobnosti pádu do trhliny, což může mít závažné následky pro misi. (B) Akce, která vede k nižší pravděpodobnosti pádu, a tedy nižšímu riziku. Zdroj: Science Robotics.
Kromě plánování s ohledem na rizika vyžaduje proces plánování na systémové úrovni také optimalizaci kvůli omezeným zdrojům a času mise. Systém by tedy měl být schopen nalézt optimalizovaná řešení relevantního plánovacího problému v rámci těchto omezení. Dále systém potřebuje schopnost rychle reagovat na anomální události, jakož i robustnost mise schopnou spojit reakci a úvahu (což je obvykle výpočetně náročnější). Splnění těchto požadavků na schopnosti plánování a provádění na systémové úrovni je cílem projektu EELS.
Přehled architektury systému
Robot EELS kombinuje všestranné hardwarové schopnosti a softwarovou architekturu, která podporuje autonomní plánování úkolů a pohybu s ohledem na rizika.
Hardware
Platforma EELS je velkorozměrový robot ve tvaru hada s aktivním pohonem „kůže“. Roboti tohoto typu byli na Zemi zkoumáni pro svou vysokou přizpůsobivost a schopnost pohybovat se v nezpevněných a složitých terénech (viz. AB 39/2021). Tradiční výzkumy se obvykle zaměřovaly na pohyb založený na tvaru, kde k pohybu napomáhá anizotropní tření povrchu, což omezuje velikost systému kvůli aktuátorům tvaru, které fungují mimo kvazistatický režim při pohonu. Platforma EELS však přináší inovaci v podobě aktivního pohonu „kůže“. Pouze několik studií se zabývalo aktivním pohonem pomocí šroubů a pásů, a tento přístup se ukázal nakonec jako efektivní. Zejména pohon založený na šroubech umožňuje platformě EELS mít vice možností než roboti s pohybem na základě tvaru, což umožňuje například větší vědecké užitečné zatížení, vyšší energetickou účinnost, lepší přilnavost k povrchu průduchu s větším průměrem a lepší pohyblivost a stoupání na ledu než tradiční mechanismy aktivní „kůže“.
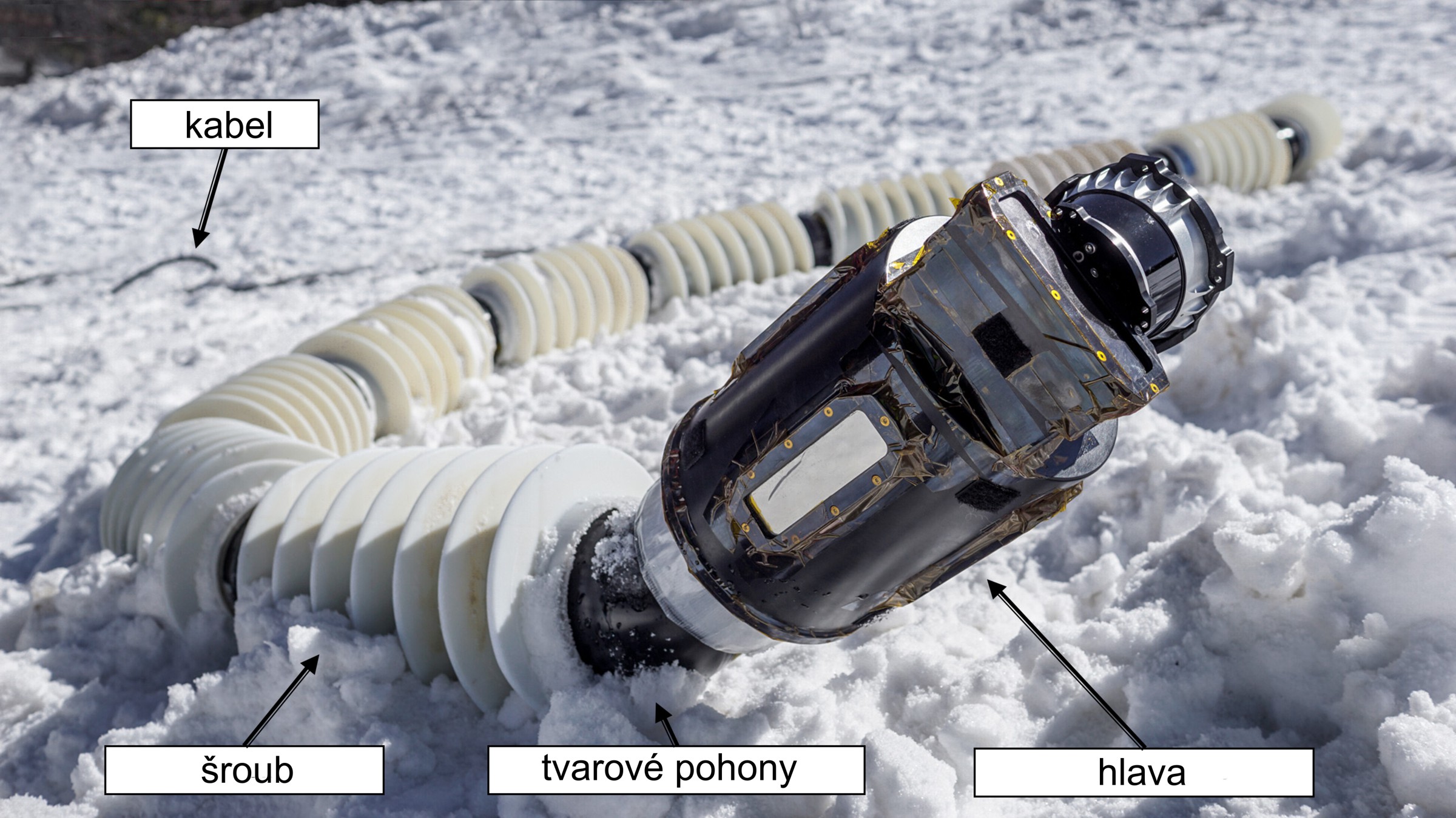
Hardware EELS. Základní komponenty robota EELS zahrnují: hlavu vybavenou senzory, tvarové pohony propojující jednotlivé segmenty těla, šrouby připojené ke každému modulu a kabel pro přenos dat a elektrické energie. Zdroj: Science Robotics.
Systém se skládá z 10 identických segmentů, které dodávají EELS opakující se strukturu typickou pro hadí roboty. Všechny segmenty mají celkovou délku přibližně 4 m a hmotnost přibližně 100 kg. Každý segment je vybaven třemi pohony, z nichž dva umožňují robotu měnit tvar, zatímco třetí pohon aktivuje pokožku (šroub). Každý tvarový pohon má maximální krouticí moment 400 N·m. Velké množství stupňů volnosti umožňuje přizpůsobivost a širokou škálu možných pohybů. Kromě přizpůsobivé mobility umožňuje sebestruktura robota hladký pokles výkonnosti a redundanci. Aktivní pohon pomocí pokožky je dosažen použitím protiotáčejících šroubů připojených k jednotlivým modulům. Tato vlastnost umožňuje pohyb při zachování tvarových pohonů v kvazistatickém režimu provozu.
EELS získává elektrickou energii a komunikuje prostřednictvím kabelu připojeného k terminálnímu segmentu robota. Dlouhé povrchové a podzemní přejezdy budou umožněny pomocí vysokého napětí, vysoké šířky pásma komunikace a lehkých kabelů.
Na opačném konci segmentu ocasu se nachází senzorická hlava, která se skládá z LiDARu Ouster OS0, čtyř stereokamer, inerciální měřicí jednotky (IMU) a barometru. Aby se usnadnilo vidění v uzavřených prostředích, jako jsou glaciální mouliny, je senzorická hlava vybavena světly s LED diodami. Systém je také vybaven proprioceptivními senzory. Aktuátory každého segmentu mají enkodéry, které poskytují zpětnou vazbu o tvaru robota, zatímco IMU se nacházejí na hlavě a ocasu, aby odhadly polohu bez spoléhání se na senzorickou hlavu. Navíc aktuální snímání umožňuje charakterizaci interakcí mezi robotem a prostředím.
Software
Softwarová architektura čerpá inspiraci z existujících autonomních rámců, a to tím, že sleduje paradigmata cílené autonomie a zavádí jak uvažování o nejistotě, tak povědomí o riziku. Na vysoké úrovni je softwarový stack EELS rozdělen na odhadovací a řídicí moduly. Odhadovací moduly mají za úkol infiltrovat informace o systému pod kontrolou a stavu prostředí. Vzestupně podle úrovně abstrakce existuje modul proprioceptivního odhadu, který slouží k získávání informací o interním stavu robota. Hlavními výstupy tohoto modulu jsou odhady tvaru a stavu kontaktu šroubu, které jsou spotřebovávány řídicími moduly. Proprioceptivní odhady jsou klíčové pro dosažení odolnosti vůči exteroceptivním selháním. Tyto odhady umožňují robotu odhadovat svou polohu pouze prostřednictvím proprioceptivních senzorů. Dále jsou nezbytné pro poskytování informací o kontaktu robota s prostředím. Tyto informace jsou důležité pro dosažení pohonu šroubů a vertikální či horizontální mobility na ledu. Exteroceptivní odhadovací modul současně odhaduje polohu robota a vytváří mapu okolního prostředí. Zpracovává surové informace z LiDARu, kamer, IMU a barometru a transformuje vstup na mapu a sekvenci poloh, které jsou používány moduly pro plánování cest a plánování úkolů a pohybu. Modul správy chyb/rizik má za úkol využít informace o stavu a pokroku v dosahování cílů z každého modulu k odhadu pravděpodobnosti selhání funkce a nejistoty v tomto odhadu. Tento modul lze chápat jako systémový monitor chyb a rizik, který uvažuje na časové a abstrakční úrovni dostatečně velké na to, aby zachytil systémové trendy, které jsou nezbytným vstupem pro modul plánování misí.
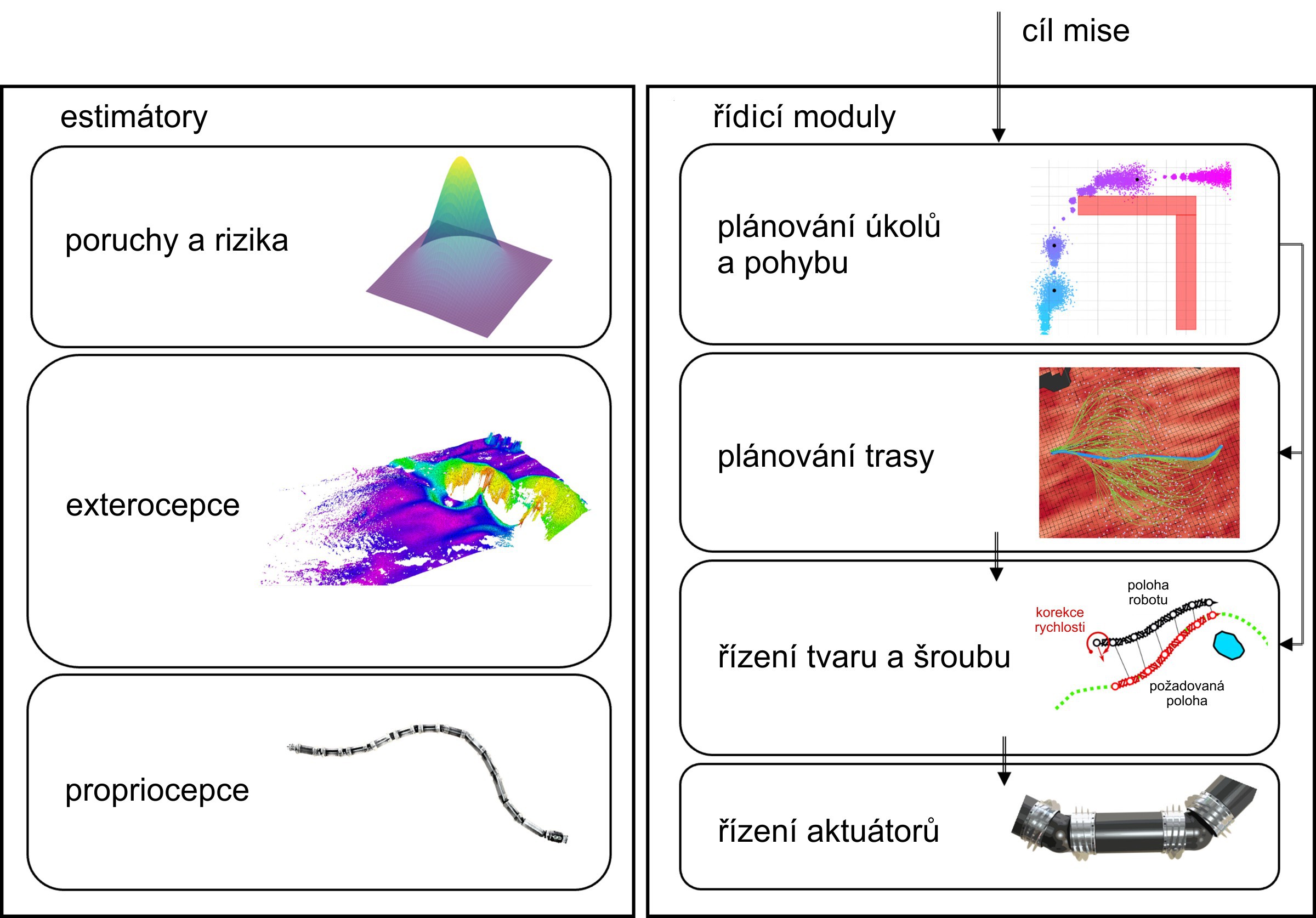
Vysoká úroveň softwarové architektury EELS. Moduly jsou hierarchicky organizovány a dělí se do dvou kategorií: estimátory a řídicí moduly. Úroveň abstrakce klesá shora dolů na obrázku. Na nejnižší úrovni estimátory odvozují stav na základě proprioceptivních informací. Exteroceptivní estimátory vytvářejí mapu a lokalizují systém. Komponenta pro správu poruch a rizik vyhodnocuje pravděpodobnostní údaje o zdravotním stavu systému. Na straně řídicích modulů je nejnižší vrstva řízení aktuátorů, která posílá příkazy motorovým ovladačům. O úroveň výše je řízení tvaru a šroubů, které generuje požadované rychlosti šroubů a polohy aktuátorů. Ještě výše se nachází plánování cest a plánování úkolů a pohybu, které postupně generují podrobné místní trasy a vysoce úrovňové plány waypointů a akcí. Zdroj: Science Robotics.
V EELS, jsou řídicí moduly hierarchicky uspořádány tak, aby usnadnily formulaci problémů, vývoj softwaru, testování komponent a údržbu kódu. Každý řídicí modul přijímá jako vstup cíl od vyššího řídicího modulu a překládá ho na rozložené cíle pro nižší řídicí modul. Na spodní úrovni této hierarchie se nacházejí příkazy pro hardware, zatímco na vrcholu jsou cíle na úrovni mise vyjádřené jako záměr operátora. řídicí modul aktuátoru (na úrovni kloubů) překládá požadované rychlosti šroubů a pozice ohybových a točivých aktuátorů na příkazy, které rozumí hardware. Řízení tvaru a šroubů zahrnuje sadu řídicích modulů, které přijímají informace o požadované trase, požadovaných kontrolérech a odchylkách a výstupem jsou požadované úhly kloubů a rychlosti šroubů. Různé pohyby vyžadují různá řídicí schémata. Modul plánování trasy přijímá cíle ve formě poloh v prostředí a generuje vhodnou trasu k těmto cílům. Modul plánování úkolů a pohybu přijímá vysoce abstraktní cíl od operátorů ve formě omezení na stav systému a plánuje sekvenci úkolů/chování (včetně pohybových úkolů), které tato omezení splňuje. Chování jsou vysoce abstraktní reprezentace schopností robota, jako „pohyb směrem k waypointu“, „skenování prostředí“ a další. Tato chování produkují cíle pro různé nižší úrovně řídicích modulů. V uvedených příkladech chování pohybu vytváří cíle pro modul plánování trasy, zatímco chování při skenování přímo interaguje s řídicím modulem tvaru.
Strategie povrchového pohybu
K demonstraci mobility v extrémních terénech byly nasazeny a otestovány dvě různé lokomoce spolu se dvěma různými metodami odhadu stavu. Hlavní strategie pohybu je inspirována autonomií více agentů a odděluje lokomoci založenou na tvaru a šroubovici. Tato lokomoce je známá jako " leader-follower" a spočívá ve vytváření dráhy, kterou následuje senzorová hlava robota. Pohonná síla je dosažena otáčením šroubových aktuátorů a každý hardwarový modul je řízen tak, aby sledoval dráhu vytyčenou senzorovou hlavou. Při použití exteroceptivního odhadu stavu lze generovat chybu mezi aktuální a požadovanou pozicí robota, což umožňuje jeho řízení směrem k plánované dráze. Zadáním odlišné rychlosti každému šroubu se robot může pohybovat holonomicky směrem k požadované pozici a pomocí šroubů korigovat jakýkoli odchyl. Pokud není exteroceptivní odhad stavu dostupný, může robot sledovat dráhu pomocí stejného způsobu pohonu šrouby a přizpůsobení tvaru, ale chyby a postup podél dráhy nebudou odhadovány. Druhá testovaná lokomoce byla založená na tvaru a tzv. "stranovém pohybu." S touto strategií je variabilní tvar robota v kombinaci s anizotropními třecími vlastnostmi šroubů využit ke generování tahu. Schopnost přepínat mezi pohyby založenými na šroubovici a na tvaru poskytuje flexibilitu a přizpůsobivost různým prostředím.
Modul pro plánování úkolů a pohybu
Modul pro plánování úkolů a pohybu se zaměřuje na usnadnění povrchové mobility kombinací plánování úkolů a pohybu za podmínek nejistoty. Během operací může exteroceptivní odhad stavu selhat jak kvůli poruchám hardwaru, tak kvůli základní nepozorovatelnosti přítomné v prostředí. Problémy s pozorovatelností jsou obzvláště výrazné u hadovitých robotů, protože jejich senzorová hlava je velmi nízko u povrchu a počet viditelných prvků je často omezený.
Když exteroceptivní odhad stavu funguje normálně, tak robot může následovat téměř optimální dráhu, přičemž malá nejistota je zaváděna přirozeným růstem kovariance, který je typický pro systémy simultánní lokalizace a mapování (SLAM) v případě absence uzavřených smyček. Na druhou stranu, když exterocepce nefunguje pohyb i dráha musí být plánovány konzervativně, a to projekcí růstu nejistoty a zajištěním, že pravděpodobnost porušení bezpečnostních omezení nikdy nepřesáhne stanovenou hodnotu.
Klíčová intuice, která ospravedlňuje použití kombinovaného prostoru akcí pro řízení a úkoly, spočívá v tom, že zvednutí senzorové hlavy pro skenování prostředí může zlepšit znalosti o poloze robota díky pozorování více prvků a potenciálně i přímému pozorování cíle. Schopnost relokalizace umožňuje modulu plánovat dráhu s aktivitami skenování, která je méně nákladná než konzervativní dráha bez skenování.
Navíc tato dráha nebude mít vyšší riziko, protože relokalizace umožňuje modulu zajistit, že bezpečnostní omezení nebudou překročena při pohybu blíže k překážkám. Další výhodou tohoto kombinovaného přístupu je, že prostředí s vysokou kumulativní frakční plochou, kde je nutné překonat úzké průchody k dosažení cíle, by mohlo být pro konzervativní plánovač dráhy neřešitelné. Naopak plánovač úkolů a pohybu by mohl v těchto podmínkách pokračovat směrem k cíli, dokud problémy s pozorovatelností neustanou a systém se nebude moci přepnout zpět na exteroceptivní navigaci.
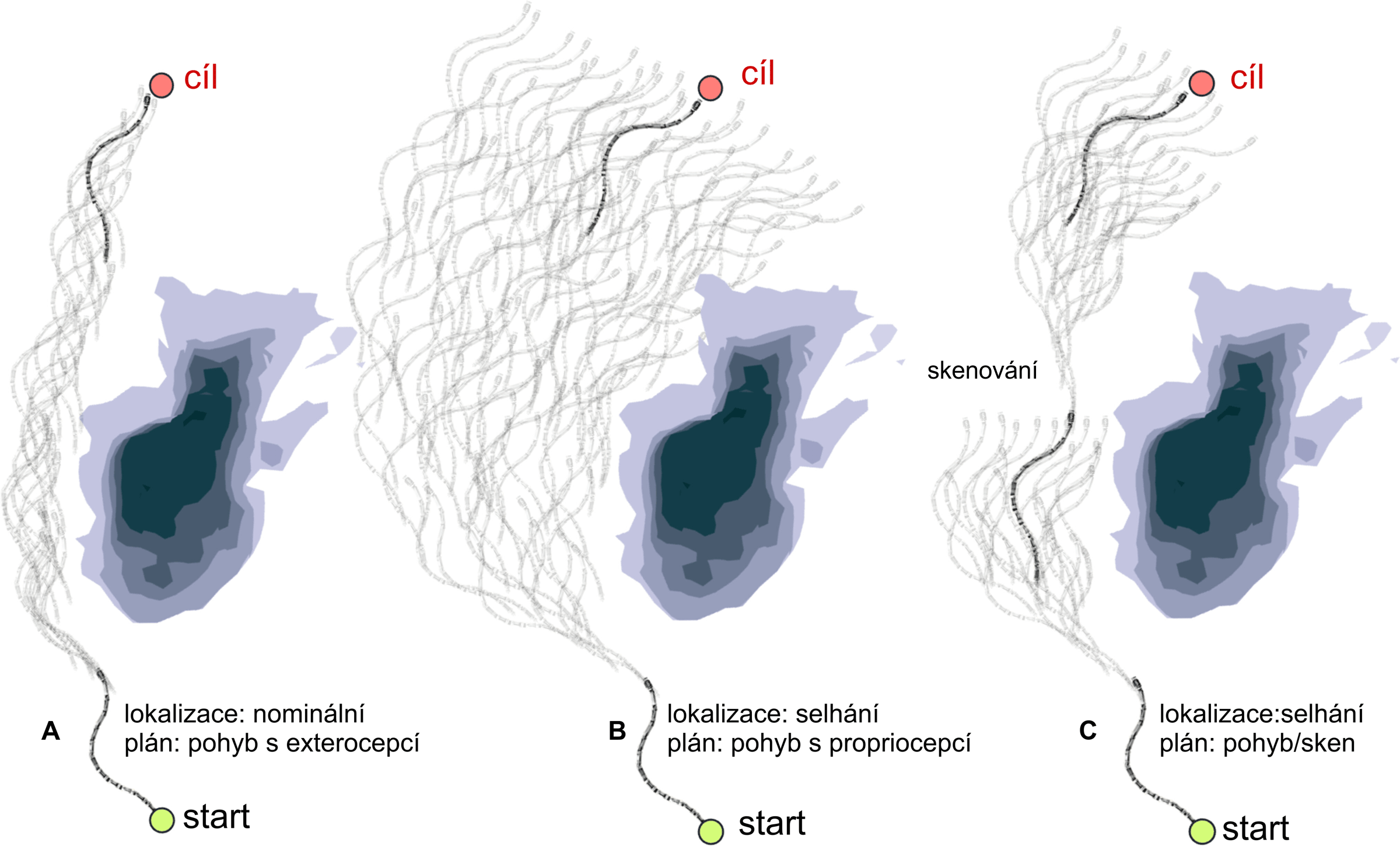
Integrované plánování úkolů a pohybu v rámci systému plánování mise. Jsou znázorněny tři scénáře povrchové mobility, všechny se stejným počátečním a cílovým bodem, mezi nimiž se nachází trhlina. Nejistota stavu je zobrazena pomocí zdvojení systému mobility a snížením jeho průhlednosti, což vytváří efekt rozmazání. (A) Nominální mobilita s nominální exterocepcí, kdy růst nejistoty je nízký a trajektorie vede blízko k trhlině. (B) Mobilita při selhání exterocepce, která spoléhá pouze na propriocepci. Za těchto podmínek nejistota rychle roste. (C) Mobilita při selhání exterocepce s aktivovaným plánovačem úkolů a pohybu. Nejistota roste stejným tempem jako v (B), avšak relokalizační akce umožňují robotu zvolit méně konzervativní a bezpečnější trajektorii. Zdroj: Science Robotics.
Výpočetně efektivní plánovač úkolů a pohybů je schopen autonomně provádět vyvážení mezi akcemi pro získání informací a výběrem trajektorie. Výzvy spojené s kombinováním kontinuálního pohybu a diskrétního plánování úkolů jsou rostoucí výzkumnou oblastí, kde klíčovým omezujícím faktorem je škálovatelnost kvůli neřešitelné povaze problému. Plánovač úkolů a pohybů se liší od předchozích prací tím, že problém formuluje pomocí matematického programování, spíše než sekvenční kombinací plánování úkolů a plánování pohybů, a explicitně zohledňuje prostor nejistoty. Rovněž se liší od dříve použitých autonomních systémů na úrovni mise, jako je EO-1 s ASE nebo plánovací komponenty mise Perseverance, tím, že se explicitně uvažuje o riziku a nejistotě, tak se kombinuje plánování úkolů s pohybovým rozvažováním. Předchozí mise operovaly v prostředích, kde mohly být plánovací předpoklady založeny na mnohem širších znalostech o prostředí, než jaké jsou k dispozici pro Enceladus. Když je plánovací proces vystaven velké nejistotě prostředí, je nutné tuto nejistotu zohlednit, a těsnější integrace mezi plánováním úkolů a pohyby umožňuje robustnější řešení ve srovnání s klasickým odděleným přístupem, protože to umožňuje vyvážení mezi bezpečností trajektorie a náklady na akce pro získání informací. Tento plánovací problém se rámcoval jako maticové celočíselné lineární programování (MILP) a otestoval se na hardwaru v laboratorním prostředí na plasticko-ledovém simulátoru jako analogii tvrdého ledového povrchu.
Shrnutí výkonu povrchové lokomoce
Povrchová mobilita byla hodnocena prostřednictvím kampaně laboratorních a terénních testů v písčitých terénech na Mars Yardu v JPL a v ledových a sněhových terénech v Big Bear, Kalifornie. Testy byly prováděny na rovinném terénu, na skloněných plochách a v přítomnosti překážek a děr. Kromě toho byly testovány písčité a sněhové terény jak v konsolidovaných, tak v nekonsolidovaných podmínkách. Široká škála testovacích konfigurací terénu kladla důraz na schopnost robota přizpůsobit se díky kombinaci šroubového a tvarového pohybu. Hlavními chody, na které se testovací kampaň zaměřila, byly „leader-follower“ a tvarové pohyby. Byly prokázány účinné metody lokomocí jak exteroceptivní, tak proprioceptivní. Pohyb na bázi šroubů umožnil sledování trajektorie uzavřenou smyčkou pro chod „leader-follower“ a tvarová lokomocí byla ukázána jako výhodná strategie pro vyproštění robota ze situací, které by znamenaly konec tradičního mobilního systému, jako je rover. Kromě toho byla tvarová lokomocí prokázána jako účinný způsob navigace v nekonsolidovaných terénech, jako je práškový sníh nebo jemný písek, když pohyb na bázi šroubů se ukázal jako méně spolehlivý. Stojí za zmínku, že exteroceptivní lokalizace a mapování několikrát selhaly v terénu. Tato selhání byla způsobena kombinací hardwarových závad a interakcí mezi exteroceptivními algoritmy a prostředím. Tato selhání poukázala na potřebu proprioceptivní kontrolní strategie a autonomie na úrovni systému, která je schopná přepínat mezi kontrolními schématy. Selhání exterocepce byla běžně způsobena degenerací v prostředí a mohou být překonána pohybem proprioceptivně, dokud se neobjeví více rysů, což umožní relokalizaci. Kromě toho, když exterocepce selže kvůli hardwarové závadě, stále má smysl pokračovat v misi, byť s konzervativnější trajektorií založenou na propriocepci.

Přehled testování v terénu pro scénáře pohybu na povrchu. Testy robota v různých prostředích: (A) zhutněný a nezhutněný sníh v Big Bear, Kalifornie; (B) led na zařízení Table Mountain v JPL; a (C) zhutněný a nezhutněný písek v Mars Yard v JPL. Zdroj: Science Robotics.
Souhrn výkonu plánování úkolů a pohybu
V systému plánování úkolů a pohybu je poukázáno na to, jak uvažování o nejistotě, riziku a explicitní plánování akcí zaměřených na získávání informací umožňuje operování v přítomnosti selhání exterocepce.
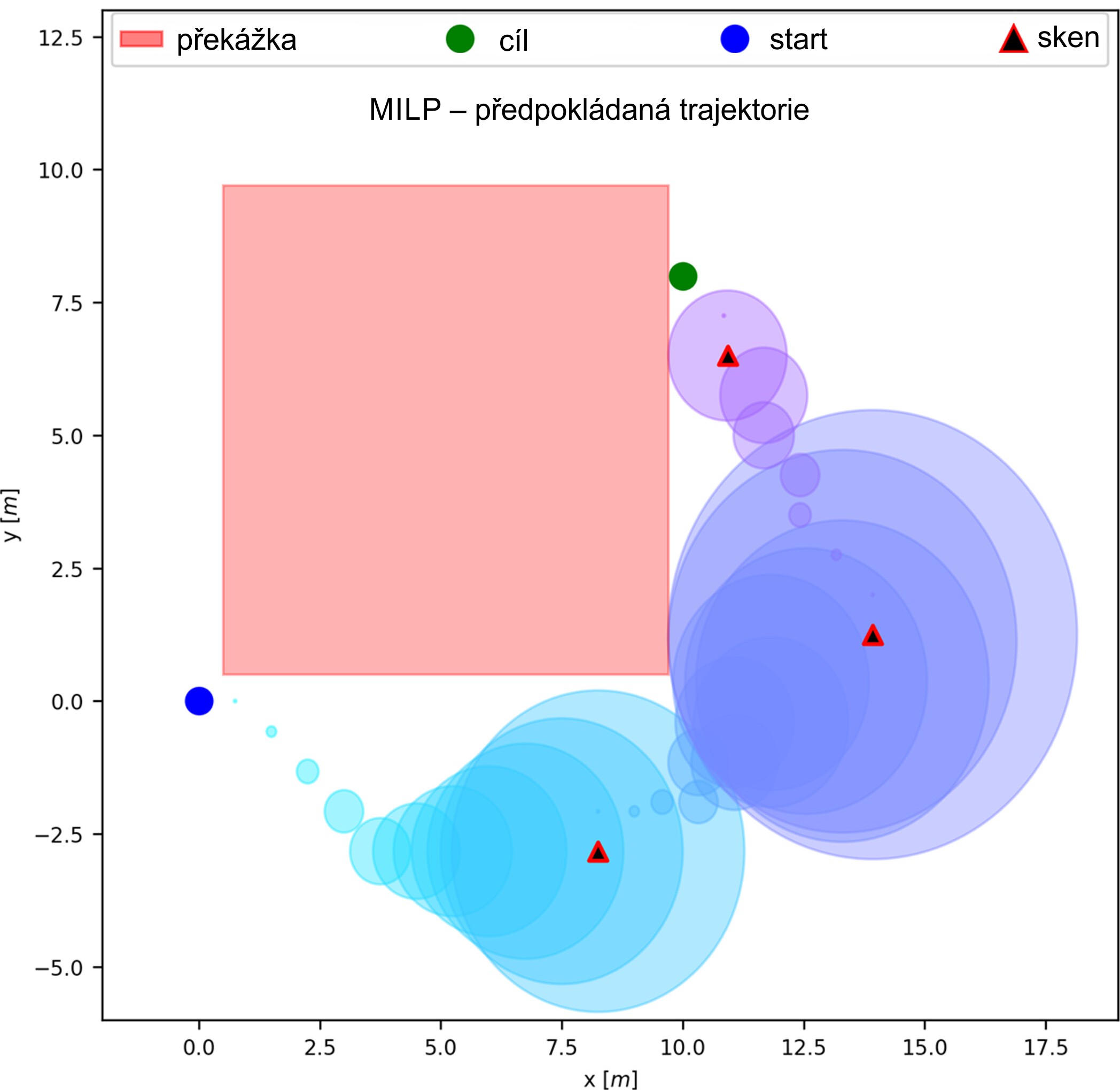
Plánovač úkolů a pohybu zaměřený na riziko založený na formulaci MILP. Vizualizace plánu v prostoru přesvědčení. Agent má úkol dosáhnout cíle (zelený bod) z výchozího bodu (modrý bod) a plánuje cestu znázorněnou pohybujícími se kruhy, jejichž barevný přechod představuje čas. Průměr každého kruhu cesty představuje předpokládanou nejistotu stavu a body v prostoru s černými trojúhelníky označují místa, kde agent naplánoval aktivitu zaměřenou na získávání informací. Zdroj: Science Robotics.
Na obrázku lze vidět znázornění plánu v prostoru přesvědčení v 2,5D simulačním prostředí. Plánovač má úkol dosáhnout cíle z výchozí pozice a generuje sekvenci řídicích vstupů, smíchaných s akcemi skenování, přičemž zohledňuje růst nejistoty (znázorněno na obrázku jako stínované kruhy). V testech hardwarového systému lze vidět chování v otevřené smyčce, kdy robot se pohybuje bez exteroceptivní zpětné vazby (neprovádí se žádné úkoly skenování a SLAM neběží), s navrhovaným plánovačem, který zohledňuje riziko. Plánování úkolů společně s pohybem robota vede k výrazně bezpečnějšímu chování, aniž by se zapojovalo do nadměrně konzervativního chování.
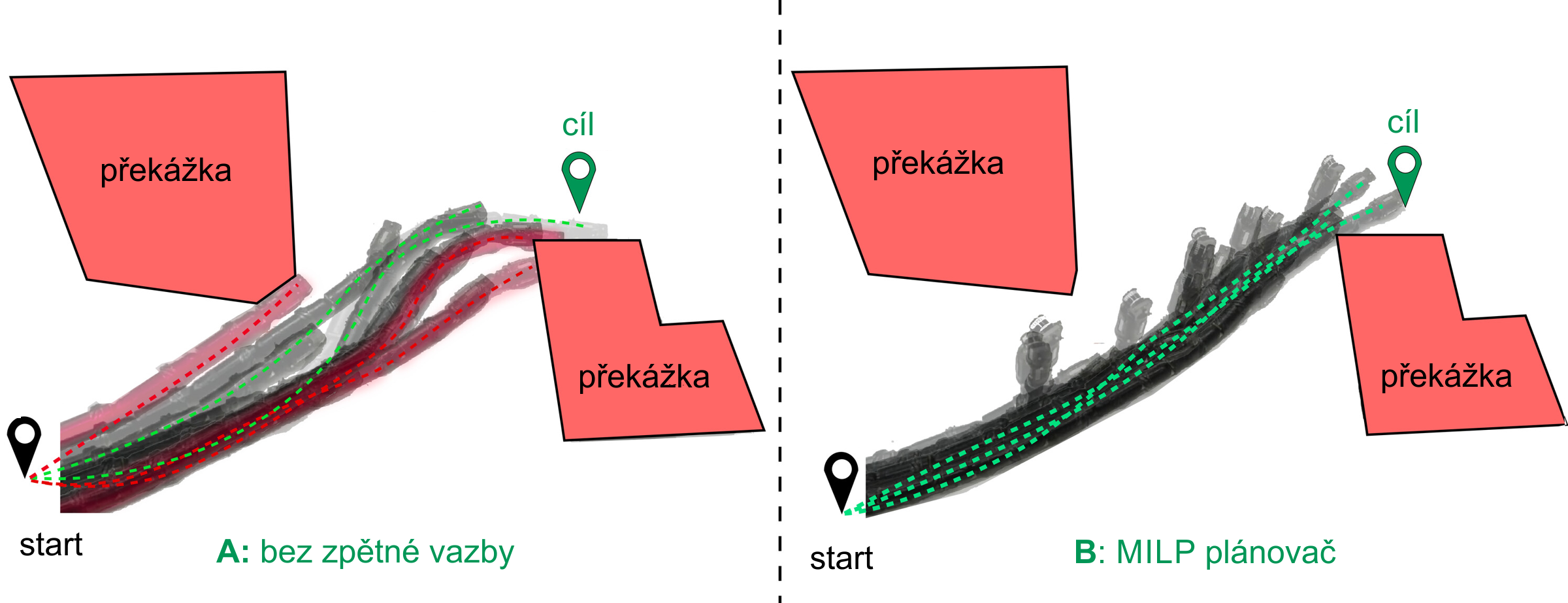
Výkon systému plánování misí. Plánovač úkolů a pohybu zaměřený na riziko, porovnaný s chováním bez zpětné vazby (open-loop). Obrázek zobrazuje několik běhů na hardwaru, které jsou překryty. Pozadí bylo odstraněno, překážky byly nahrazeny červenými geometrickými tvary, výchozí a cílové pozice jsou označeny kolíky a trajektorie robota jsou zobrazeny jako přerušované čáry. Trajektorie vedoucí k nárazu jsou označeny červeně, zatímco úspěšné trajektorie jsou v zelené barvě. (A) Jak chování bez zpětné vazby v přítomnosti rostoucí nejistoty stavu vede k několika selháním provedení plánu. (B) Jak MILP plánovač zaměřený na riziko bezpečně dosahuje cíle tím, že naplánuje akce zaměřené na získávání informací podél cesty. Zdroj: Science Robotics.
Obrázek ukazuje rozdíl mezi chováním v otevřené smyčce a plánovačem úkolů a pohybu, který zohledňuje riziko. Testovalo se selhání exteroceptivní lokalizace robota blízko země a že akce zaměřená na získávání informací může být provedena přemístěním pozice senzoru. U robota EELS tyto chování zaměřená na získávání informací spočívají ve zvednutí hlavy robota a hledání charakteristik. Lze vidět, jak otevřená strategie porušuje bezpečnostní omezení, zatímco strategie zaměřená na riziko dosahuje cíle tím, že operuje v otevřené smyčce, ale získává nové informace a plánuje znovu, když se nejistota stavu příliš zvýšila. V těchto laboratorních podmínkách byl plánovač úkolů a pohybu schopen konzistentně najít plán do 10 s od jeho aktivace na základní platformě (Intel i7 NUC na 2,65 GHz, 32 GB paměti). Tento problém plánování úkolů a pohybu je podmnožinou celkového problému plánování mise, který je třeba vyřešit pro operování na povrchu Enceladu, protože prostor akcí, který se uvažoval, je omezen na pohyb a akce zaměřené na získávání informací. Problém plánování celé mise bude zahrnovat úkoly, jako je sběr vědeckých dat, komunikace a další chování pro obnovu po selhání.
Závěr
I když se robot EELS pohybuje rychlostí řádu centimetrů za sekundu, rychlé reakční časy v řídicí vrstvě jsou potřebné během vertikální mobility a pohybu na povrchu kvůli možným skluzům nebo jiným dynamickým událostem. Strategické plánování misí a cest může probíhat při mnohem nižší frekvenci bez přidaného rizika pro misi. Hierarchická organizace softwarové architektury EELS umožnila uvažování a reakce na různých časových měřítkách. To je rozhodující návrhové rozhodnutí, které činí problém, který by jinak byl příliš komplexní, formulovatelným a řešitelným. Řídicí vrstva byla navržena k iterování stokrát za sekundu, zatímco plánovač úkolů a pohybu byl vyvolán každých 1 až 10 s. Dalším aspektem, který stojí za zvážení, je reakce na selhání schopností. Jde o adaptace na úrovni systému, které jsou často časově citlivé a musí probíhat s latencí v řádu 1 s. To vyžaduje přístup k vysoké úrovni plánování, který spojuje uvažování a reakci na selhání. Nevýhodou hierarchických architektur je, že modely systémů na různých úrovních mohou vzájemně nečekaně interagovat, pokud nejsou pečlivě navrženy. Příklad, který se objevil při formulaci komponenty plánování úkolů a pohybu, je zacházení s neholonomními omezeními. Omezení se může zanedbat v nejvyšších vrstvách uvažování, ale pouze za podmínek, kdy nejvyšší plánovač uvažoval o mnohem větších prostorových měřítkách, než jaké jsou významné pro tato omezení. Například pokud mají neholonomní omezení vliv na měřítko metrů, měl by plánovač úkolů a pohybu uvažovat o měřítku stovek metrů nebo kilometrů.
„Úspěch je součet malých snah, opakovaných den za dnem.“
Robert Collier
Odkazy
- T. S. Vaquero et al.: EELS: Autonomous snake-like robot with task and motion planning capabilities for ice world exploration; Science Robotics 9/88, 13 Mar 2024
- Dr. Masahiro (Hiro) Ono et al.: Enceladus Vent Explorer Concept; 2016 NIAC Phase I Study Journey to the Center of Icy Moons
- La Nacion: Así es el nuevo robot de la NASA para buscar vida extraterrestre en los océanos congelados de Saturno
- Youtube: NASA Jet Propulsion Laboratory: Testing Out JPL’s New Snake Robot
- Wikipedia: Leader/followers
- ChatGPT
![]()
![]()
